
D – AIS48050A Niedrig – Spannung Intelligenter Servomotortreiber


$0.00
Technische Parameter
- Beschreibung
Beschreibung
D – AIS48050A Niedrig – Spannung Intelligenter Servomotortreiber
Produktdetails
Es zeichnet sich durch starke Stabilität aus, hoch – Präzisionspositionierung, hohe motorische Reaktion, geräuscharm, geringe Wärmeentwicklung, Bußgeld – strukturiertes Design, starke Überlastfähigkeit, praktische und reichhaltige Funktionen, und einfache und bequeme Anwendung. Es verfügt über Schutzmaßnahmen gegen Überschreitung – Stromspannung, unter – Stromspannung, Übergeschwindigkeit, über – aktuell, Überlast, Encoder-Anomalien, Positionsabweichung, Stall, Parameteranomalien, usw.
Technische Spezifikationen
| Antriebsmodell | Spannungsbereich (V) | Nennstrom (A) |
| D – AIS24008A | 24 – 36 | 8 |
| D – AIS48015A | 24 – 48 | 15 |
| D – AIS48025A | 24 – 60 | 25 |
| D – AIS48050A | 24 – 72 | 50 |
| D – AIS48100A | 36 – 72 | 100 |
| D – AIS72200A | 48 – 96 | 200 |
| D – AIS72300A | 48 – 96 | 300 |
| Kontrollmethode | ① Positionssteuerung ② Geschwindigkeitssteuerung ③ Drehmomentsteuerung ④ Kommunikationssteuerung |
| Kontrolleigenschaften | Geschwindigkeitsfrequenzgang: ≥200Hz, Empfangene Impulsfrequenz ≤200 kHz, Geschwindigkeitsschwankungsrate: < ±0,03 (Laden 0 – 100%): < ±0,02×(0.9 – 1.1) Stromversorgungsspannung |
| Überwachungsfunktion | Aktuelle Geschwindigkeit, DI-Eingang, DO-Ausgabe, Aktuelle Position, Befehlseingangsimpulsakkumulation, Durchschnittliche Laderate, Anzahl der Positionsabweichungen, Motorphasenstrom, Busspannungswert, Modultemperatur, Alarmaufzeichnung, Befehlsimpulsfrequenz entsprechende Geschwindigkeit, Betriebsstatus, usw. |
| Heim – return-Funktion | 13 Arten von Autonomie (Suchen) Heim – Rückkehrmodi, und Zuhause – Punkt-Offset-Funktion |
| Rs485-Funktion | Folgt Standard-Modbus – Rtu-Protokoll, Eins – Zu – Zwei Zwei – Way-Kommunikationsschnittstelle für einfache Vernetzung und Parallelverbindung |
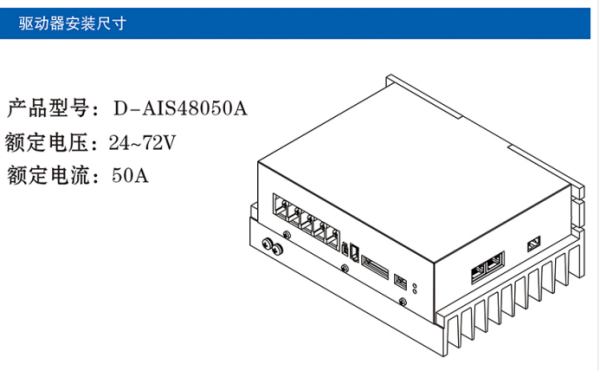
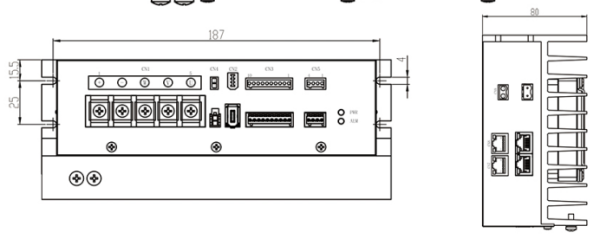
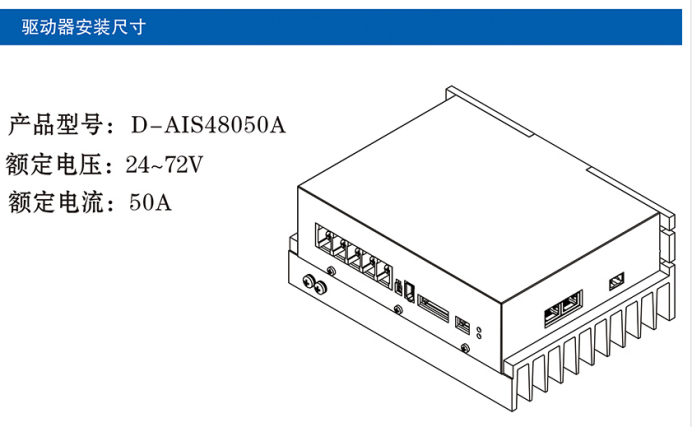
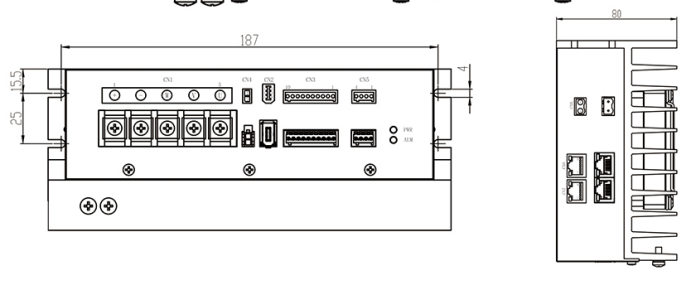
Abmessungen der Treiberinstallation
Produktmodell: D – AIS48050A
Nennspannung: 24 – 72V
Nennstrom: 50A
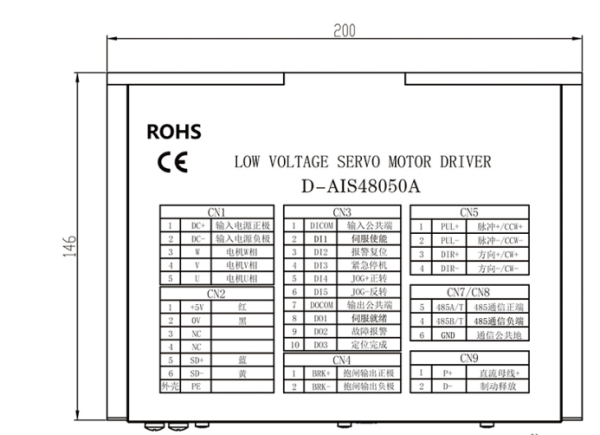
Teilt – Typ Laufwerk-Hardware-Schnittstelle
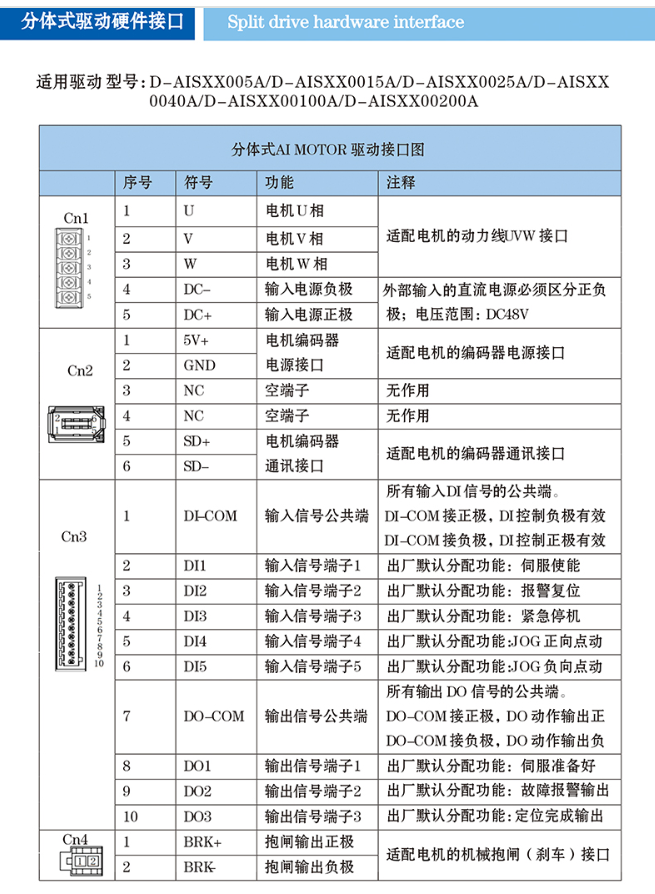
Anwendbare Antriebsmodelle: D – AISXX005A / D – AISXX0015A / D – AISXX0025A / D – AISXX0040A / D – AISXX00100A / D – AISXX00200A
Teilt – Typ AI MOTOR-Antriebsschnittstellendiagramm
| Seriennummer | Symbol | Funktion | Bemerkungen | |
| Cn1 | 1 | U | Motor U – Phase | Stromkabel JVW-Schnittstelle zur Adaption des Motors |
| 2 | V | Motor V – Phase | ||
| 3 | W | Motor W – Phase | ||
| 4 | Gleichstrom – | Minuspol der Eingangsstromversorgung | Die externe DC-Eingangsstromversorgung muss positive und negative Pole unterscheiden; Spannungsbereich: DC48V | |
| 5 | DC+ | Pluspol der Eingangsstromversorgung | ||
| Cn2 | 1 | 5V+ | Motor-Encoder-Leistungsschnittstelle | Power-Interface zur Adaption des Motorgebers |
| 2 | GND | Stromschnittstelle | ||
| 3 | NC | Leeres Terminal | Keine Funktion | |
| 4 | NC | Leeres Terminal | Keine Funktion | |
| 5 | SD+ | Motor-Encoder-Kommunikationsschnittstelle | Kommunikationsschnittstelle zur Anpassung des Motorgebers | |
| 6 | SD – | |||
| Cn3 | 1 | AUS – COM | Gemeinsamer Anschluss der Eingangssignale | Gemeinsamer Anschluss für alle Eingangs-DI-Signale. Als DI – COM ist mit dem Pluspol verbunden, die Negativkontrolle von DI ist wirksam; wenn IN – COM ist mit dem Minuspol verbunden, die positive Kontrolle von DI ist wirksam |
| 2 | Di1 | Eingangssignalanschluss 1 | Fabrik – standardmäßig zugewiesene Funktion: Servofreigabe | |
| 3 | DI2 | Eingangssignalanschluss 2 | Fabrik – standardmäßig zugewiesene Funktion: Alarm-Reset | |
| 4 | DI3 | Eingangssignalanschluss 3 | Fabrik – standardmäßig zugewiesene Funktion: Nothalt | |
| 5 | DI4 | Eingangssignalanschluss 4 | Fabrik – standardmäßig zugewiesene Funktion: JOG positiver Jog | |
| 6 | DI5 | Eingangssignalanschluss 5 | Fabrik – standardmäßig zugewiesene Funktion: JOG negativer Tipp | |
| 7 | TUN – COM | Gemeinsamer Anschluss der Ausgangssignale | Gemeinsamer Anschluss für alle DO-Ausgangssignale. Wenn DO – COM ist mit dem Pluspol verbunden, Die positive Ausgabe der DO-Aktion ist wirksam; wann TUN – COM ist mit dem Minuspol verbunden, Der negative Ausgang der DO-Aktion ist wirksam | |
| 8 | DO1 | Ausgangssignalanschluss 1 | Fabrik – standardmäßig zugewiesene Funktion: Servo bereit | |
| 9 | DO2 | Ausgangssignalanschluss 2 | Fabrik – standardmäßig zugewiesene Funktion: Fehleralarmausgang | |
| 10 | DO3 | Ausgangssignalanschluss 3 | Fabrik – standardmäßig zugewiesene Funktion: Ausgabe der Positionierungsvervollständigung | |
| Cn4 | 1 | BRK+ | Pluspol des Bremsausgangs | Schnittstelle zur Adaption der mechanischen Bremse (Bremse) des Motors |
| 2 | BRK – | Minuspol des Bremsausgangs |
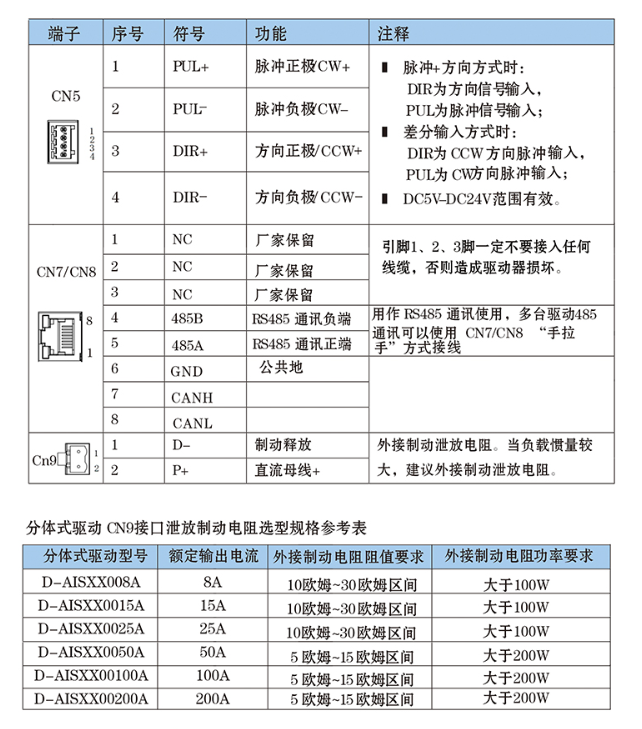
| Terminal | Seriennummer | Symbol | Funktion | Bemerkungen |
| CN5 | 1 | PUL+ | Positiver Pol des Pulses (CW+) | Wenn im Puls + Richtungsmodus: DIR ist der Richtungssignaleingang, und PUL ist der Impulssignaleingang; im Differenzeingangsmodus: DIR ist der Impulseingang für die CCW-Richtung, und PUL ist der CW-Richtungsimpulseingang; wirksam innerhalb der DC5V – DC24V-Bereich |
| 2 | PUL – | Negativer Pulspol (CW – ) | ||
| 3 | DIR+ | Positiver Richtungspol (CCW+) | ||
| 4 | DIR – | Negativer Richtungspol (Gegen den Uhrzeigersinn – ) | ||
| CN7/CN8 | 1 | NC | Vom Hersteller vorbehalten | Stifte 1, 2, Und 3 darf nicht an irgendwelche Leitungen angeschlossen werden, Andernfalls wird der Treiber beschädigt |
| 2 | NC | Vom Hersteller vorbehalten | ||
| 3 | NC | Vom Hersteller vorbehalten | ||
| 4 | 485B | Minuspol der RS485-Kommunikation | Wird für die RS485-Kommunikation verwendet. Mehrere Antriebe können in einem verkabelt werden “Gänseblümchen – Kette” über CN7/CN8 für die RS485-Kommunikation | |
| 5 | 485A | Pluspol der RS485-Kommunikation | ||
| 6 | GND | Gemeinsamkeit | ||
| 7 | SUPPE | |||
| 8 | LIVE | |||
| Cn9 | 1 | D – | Lösen der Bremse | Schließen Sie einen externen Bremsentladewiderstand an. Wenn die Lastträgheit groß ist, Es wird empfohlen, einen externen Bremsentladewiderstand anzuschließen |
| 2 | P+ | DC-Bus + |
Auswahlspezifikations-Referenztabelle für den Entladebremswiderstand von Split – Typ Drive Cn9-Schnittstelle
| Teilt – Typ Antriebsmodell | Nennausgangsstrom | Anforderung an den Widerstandswert des externen Bremswiderstands | Anforderung an die Leistung des externen Bremswiderstands |
| D – AISXX008A | 8A | 10 Ohm – 30 Ohm-Bereich | Mehr als 100 W |
| D – AISXX0015A | 15A | 10 Ohm – 30 Ohm-Bereich | Mehr als 100 W |
| D – AISXX0025A | 25A | 10 Ohm – 30 Ohm-Bereich | Mehr als 100 W |
| D – AISXX0050A | 50A | 5 Ohm – 15 Ohm-Bereich | Mehr als 200 W |
| D – AISXX00100A | 100A | 5 Ohm – 15 Ohm-Bereich | Mehr als 200 W |
| D – AISXX00200A | 200A | 5 Ohm – 15 Ohm-Bereich | Mehr als 200 W |
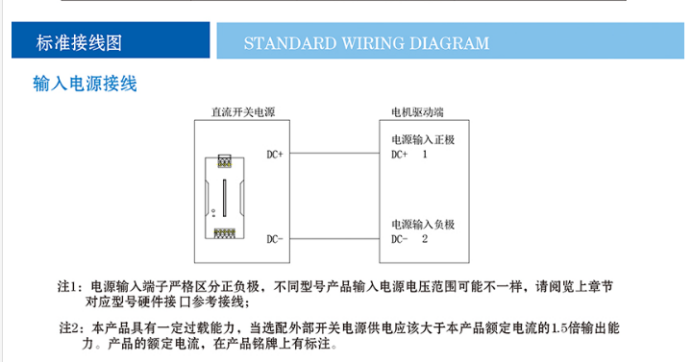
Standardschaltplan
Verkabelung der Eingangsstromversorgung
Notiz 1: Die Eingangsstromversorgungsklemmen müssen strikt zwischen positiven und negativen Polen unterscheiden. Der Eingangsspannungsbereich der Stromversorgung kann je nach Modell variieren. Bitte beachten Sie die Referenzverkabelung der Hardware-Schnittstelle für das entsprechende Modell im vorherigen Kapitel.
Notiz 2: Dieses Produkt verfügt über eine gewisse Überlastfähigkeit. Bei Auswahl eines externen Schaltnetzteils, Die Ausgangskapazität sollte sein 1.5 fache des Nennstroms dieses Produkts. Der Nennstrom des Produkts ist auf dem Typenschild angegeben.
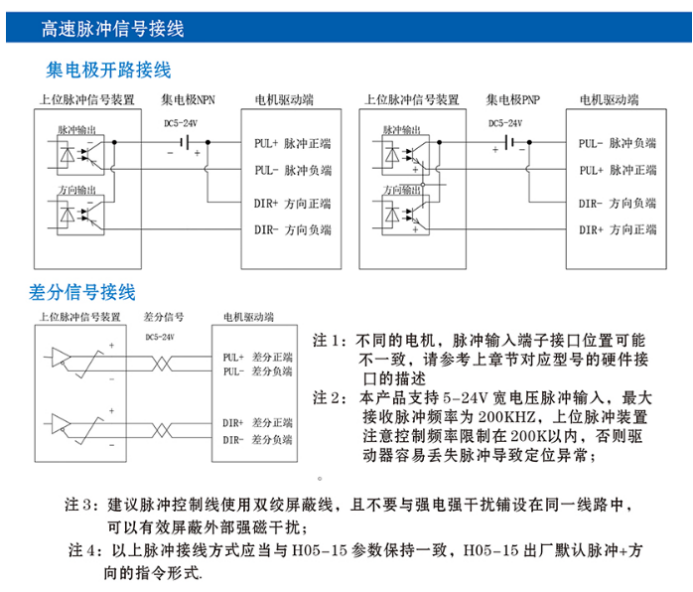
Hoch – Verkabelung des Geschwindigkeitsimpulssignals
Kollektor – Öffnen Sie die Verkabelung
Differenzsignalverkabelung
Notiz 1: Für verschiedene Motoren, Die Schnittstellenpositionen der Impulseingangsklemmen können variieren. Bitte beachten Sie die Beschreibung der Hardware-Schnittstelle des entsprechenden Modells im vorherigen Kapitel.
Notiz 2: Dieses Produkt unterstützt Impulseingänge mit einem weiten Spannungsbereich 5 – 24V, und die maximale empfangene Impulsfrequenz beträgt 200 kHz. Das Obermaterial – Das Pegelimpulsgerät sollte darauf achten, die Frequenz auf 200 K zu begrenzen, um zu verhindern, dass der Fahrer leicht Impulse verliert und Positionierungsanomalien verursacht.
Notiz 3: Es wird empfohlen, doppelt zu verwenden – Verwenden Sie für Impulssteuerleitungen abgeschirmte Leitungen und vermeiden Sie deren Verlegung im gleichen Stromkreis wie Starkstromleitungen – aktuelle Störquellen, wodurch externe starke magnetische Störungen wirksam abgeschirmt werden können.
Notiz 4: Die oben genannten Impulsverbindungsmethoden sollten mit dem H05 übereinstimmen – 15 Parameter. Die Werkseinstellung für H05 – 15 ist Puls + Richtungsbefehlsmodus.
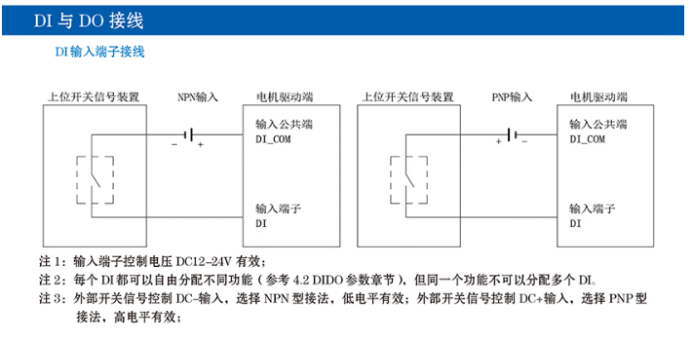
DI- und DO-Verkabelung
Verdrahtung der AT-Eingangsklemmen
Notiz 1: Die Steuerspannung der Eingangsklemmen beträgt DC12 – 24V.
Notiz 2: Jedem DI können verschiedene Funktionen frei zugewiesen werden (beziehen sich auf die 4.2 DIDO-Parameterabschnitt), aber die gleiche Funktion kann nicht mehreren DIs zugewiesen werden.
Notiz 3: Zur externen Schaltsignalansteuerung mit Gleichstrom – Eingang, Wählen Sie den NPN aus – Art der Verbindungsmethode, wo niedrig – Stufe ist wirksam; zur externen Schaltsignalsteuerung mit DC+ Eingang, Wählen Sie den PNP – Art der Verbindungsmethode, wo hoch – Stufe ist wirksam.
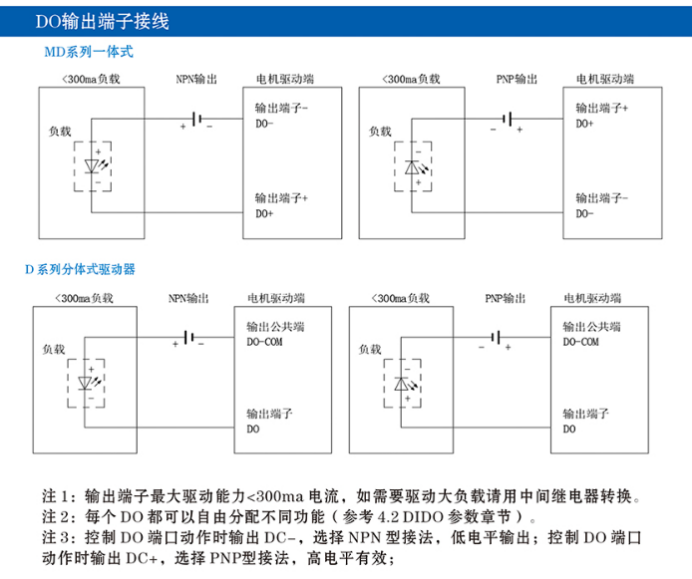
Verdrahtung der DO-Ausgangsklemmen
Notiz 1: Die maximale Antriebskapazität der Ausgangsklemmen beträgt <300ma Strom. Wenn eine große Last gefahren werden muss, Zur Umrechnung sollte ein Relais verwendet werden.
Notiz 2: Jedem DO können frei unterschiedliche Funktionen zugewiesen werden (beziehen sich auf die 4.2 DIDO-Parameterabschnitt).
Notiz 3: Bei der Steuerung der DO-Port-Aktion, wenn DC – ausgegeben wird, Wählen Sie den NPN aus – Art der Verbindungsmethode, wo niedrig – Pegelausgabe wirksam ist; wenn DC+ ausgegeben wird, Wählen Sie den PNP – Art der Verbindungsmethode, wo hoch – Pegelausgabe wirksam ist.
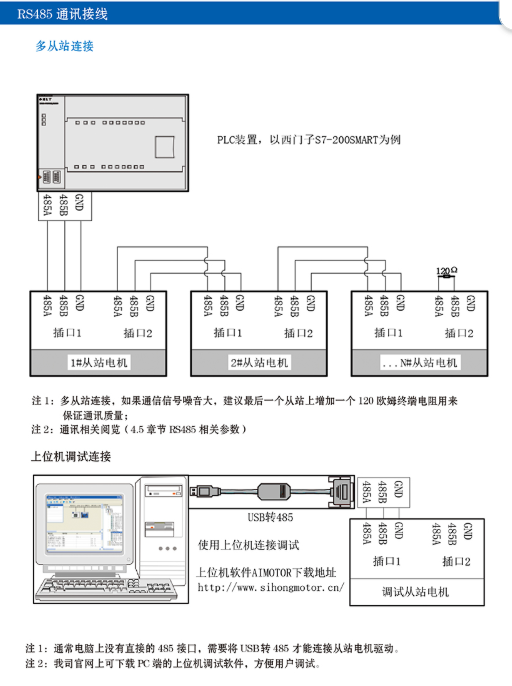
RS485-Kommunikationsverkabelung
Multi – Slave-Verbindung
Notiz 1: Für Multi – Slave-Verbindung, wenn das Kommunikationssignalrauschen groß ist, Es wird empfohlen, a hinzuzufügen 120 – Ohm-Abschlusswiderstand zum letzten Slave, um die Kommunikationsqualität sicherzustellen.
Notiz 2: Zur Kommunikation – verwandte Inhalte, beziehen sich auf (Abschnitt 4.5 RS485 – verwandte Parameter).
Host-Computer-Debugging-Verbindung
Notiz 1: Normalerweise, Ein Computer hat keine direkte Verbindung 485 Schnittstelle, und ein USB – Zu – 485 Für den Anschluss an den Slave-Motorantrieb ist ein Umrichter erforderlich.
Notiz 2: Die Host-Computer-Debugging-Software für den PC kann von der offiziellen Website unseres Unternehmens heruntergeladen werden, Dies ist für Benutzer praktisch zum Debuggen.