
D – AIS48100A bajo – Controlador de servomotor inteligente de voltaje


$0.00
Parámetros técnicos
- Descripción
Descripción

D – AIS48100A bajo – Controlador de servomotor inteligente de voltaje
Detalles del producto
Presenta una gran estabilidad., alto – posicionamiento de precisión, alta respuesta motora, bajo ruido, baja generación de calor, bien – diseño estructurado, fuerte capacidad de sobrecarga, funciones prácticas y ricas, y aplicación sencilla y cómoda. Tiene protecciones contra sobre – Voltaje, bajo – Voltaje, exceso de velocidad, encima – actual, sobrecarga, anomalías del codificador, desviación de posición, parar, anomalías de los parámetros, etc..
Especificaciones técnicas
| Modelo de unidad | Rango de voltaje (V) | Corriente nominal (A) |
| D – AIS24008A | 24 – 36 | 8 |
| D – AIS48015A | 24 – 48 | 15 |
| D – AIS48025A | 24 – 60 | 25 |
| D – AIS48050A | 24 – 72 | 50 |
| D – AIS48100A | 36 – 72 | 100 |
| D – AIS72200A | 48 – 96 | 200 |
| D – AIS72300A | 48 – 96 | 300 |
| Método de control | ① Control de posición ② Control de velocidad ③ Control de par ④ Control de comunicación |
| Características de control | Respuesta de frecuencia de velocidad: ≥200Hz, Frecuencia de pulso recibida ≤200kHz, Tasa de fluctuación de velocidad: < ±0,03 (Carga 0 – 100%): < ±0,02×(0.9 – 1.1) Voltaje de la fuente de alimentación |
| Función de monitoreo | Velocidad actual, Entrada DI, Salida HACER, Posición actual, Acumulación de pulso de entrada de comando, Tasa de carga promedio, Recuento de desviación de posición, Corriente de fase del motor, Valor de voltaje del bus, Temperatura del módulo, Registro de alarma, Frecuencia de pulso de comando Velocidad correspondiente, Estado de funcionamiento, etc.. |
| Hogar – función de retorno | 13 Tipos de autónomos (Buscar) Hogar – Modos de retorno, y hogar – Función de compensación de punto |
| Función Rs485 | Sigue Modbus estándar – Protocolo Rtu, Uno – a – dos dos – Interfaz de comunicación way para una fácil conexión en red y en paralelo |
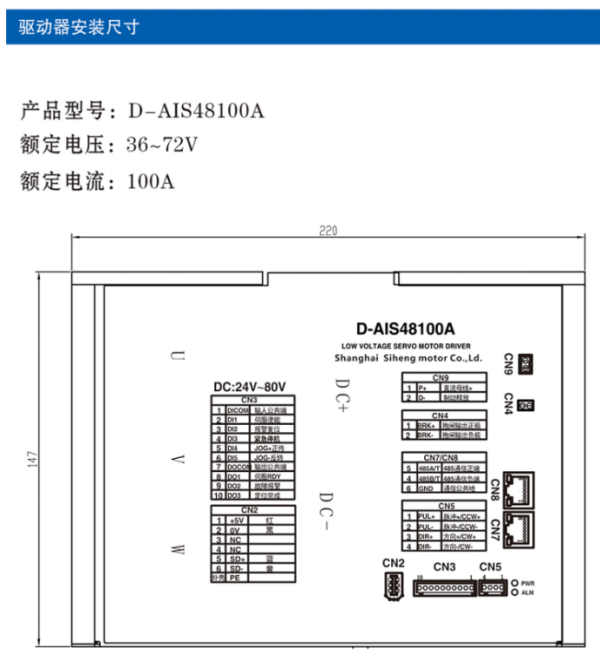
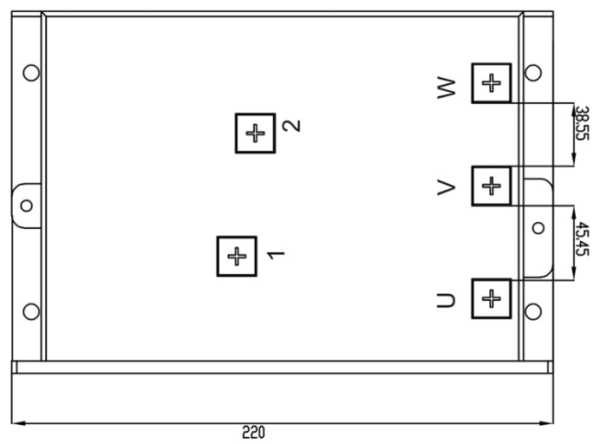
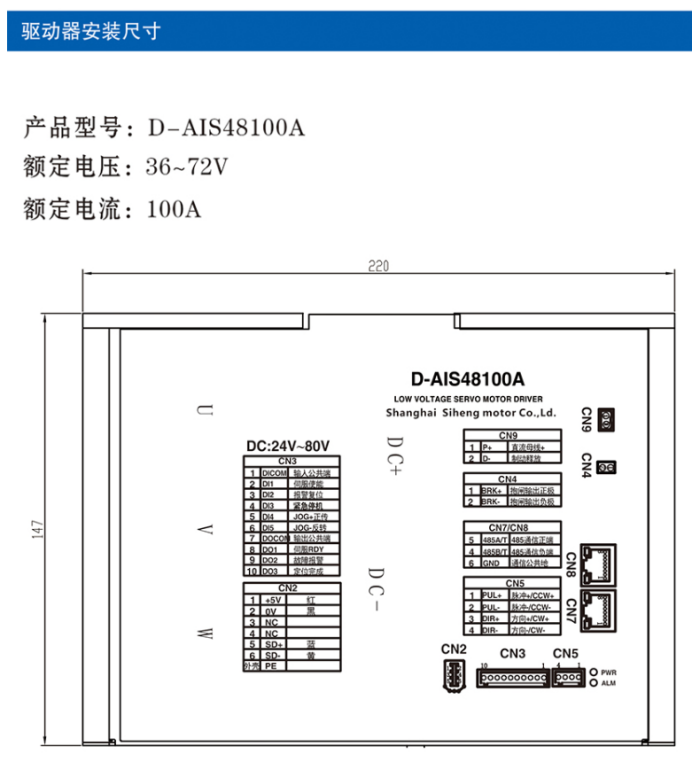
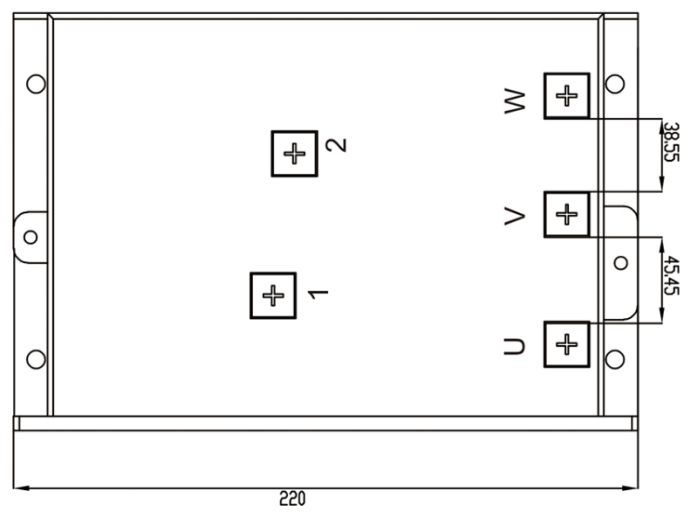
Dimensiones de instalación del controlador
Modelo de producto: D – AIS48100A
Tensión nominal: 36 – 72V
Corriente nominal: 100A
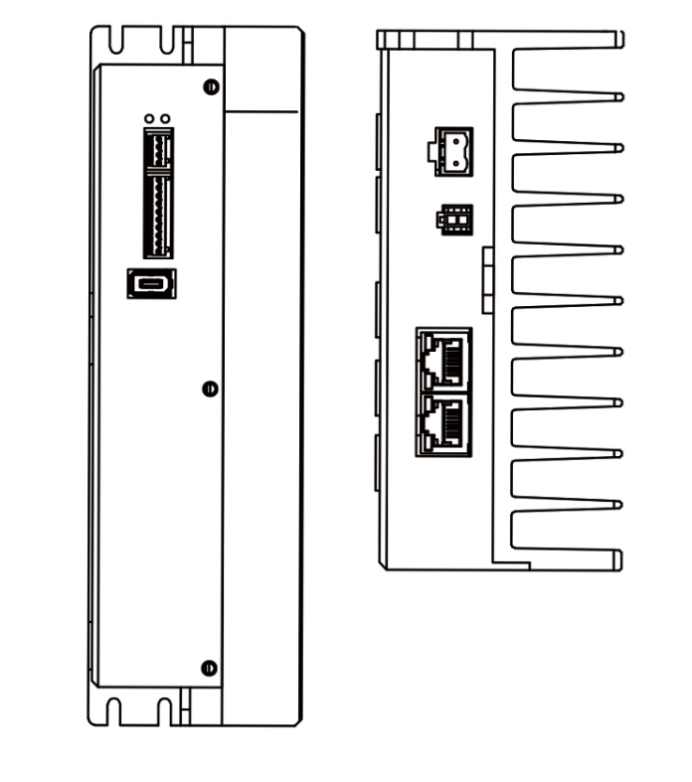
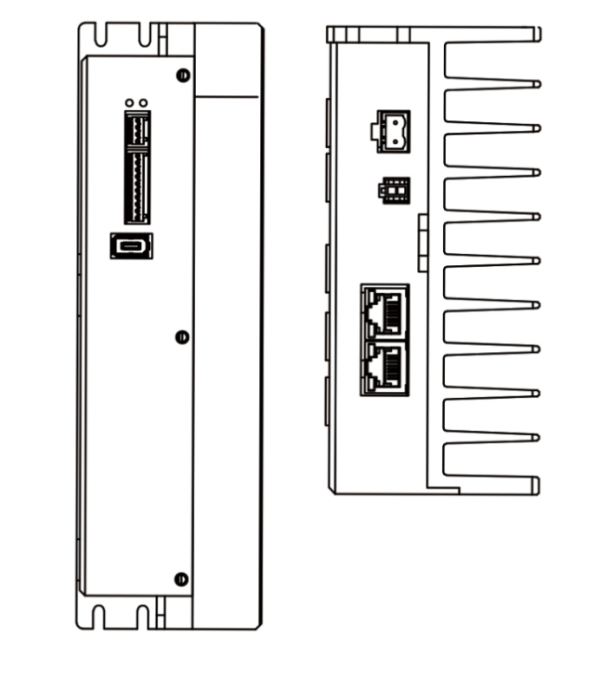
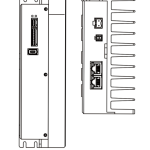
Dividir – tipo Interfaz de hardware de unidad
Modelos de unidades aplicables: D – AISXX005A / D – AISXX0015A / D – AISXX0025A / D – AISXX0040A / D – AISXX00100A / D – AISXX00200A
Dividir – Diagrama de interfaz de accionamiento del MOTOR tipo AI
| Número de serie | Símbolo | Función | Observaciones | |
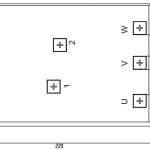
| Cn1 | 1 | Ud. | Motor U – fase | Cable de alimentación Interfaz JVW para adaptación del motor. |
| 2 | V | Motor V – fase | ||
| 3 | W | Motor W – fase | ||
| 4 | corriente continua – | Polo negativo de la fuente de alimentación de entrada. | La fuente de alimentación CC de entrada externa debe distinguir los polos positivo y negativo.; rango de voltaje: CC48V | |
| 5 | CC+ | Polo positivo de la fuente de alimentación de entrada. | ||
| Cn2 | 1 | 5V+ | Interfaz de alimentación del codificador del motor | Interfaz de alimentación para adaptar el codificador del motor. |
| 2 | Tierra | Interfaz de energía | ||
| 3 | CAROLINA DEL NORTE | Terminal vacía | Sin función | |
| 4 | CAROLINA DEL NORTE | Terminal vacía | Sin función | |
| 5 | SD+ | Interfaz de comunicación del codificador del motor | Interfaz de comunicación para adaptar el codificador del motor. | |
| 6 | DAKOTA DEL SUR – | |||
| cn3 | 1 | DE – COM | Terminal común de señales de entrada. | Terminal común para todas las señales DI de entrada. Cuando DI – COM está conectado al polo positivo., el control negativo de DI es efectivo; cuando EN – COM está conectado al polo negativo., el control positivo de DI es efectivo |
| 2 | Di1 | Terminal de señal de entrada 1 | Fábrica – función asignada por defecto: habilitación de servo | |
| 3 | DI2 | Terminal de señal de entrada 2 | Fábrica – función asignada por defecto: Restablecimiento de alarma | |
| 4 | DI3 | Terminal de señal de entrada 3 | Fábrica – función asignada por defecto: parada de emergencia | |
| 5 | DI4 | Terminal de señal de entrada 4 | Fábrica – función asignada por defecto: JOG jog positivo | |
| 6 | DI5 | Terminal de señal de entrada 5 | Fábrica – función asignada por defecto: JOG jog negativo | |
| 7 | HACER – COM | Terminal común de señales de salida. | Terminal común para todas las señales DO de salida. cuando HACER – COM está conectado al polo positivo., el resultado positivo de la acción DO es efectivo; cuando HACER – COM está conectado al polo negativo., el resultado negativo de la acción DO es efectivo | |
| 8 | DO1 | Terminal de señal de salida 1 | Fábrica – función asignada por defecto: servo listo | |
| 9 | DO2 | Terminal de señal de salida 2 | Fábrica – función asignada por defecto: Salida de alarma de fallo | |
| 10 | DO3 | Terminal de señal de salida 3 | Fábrica – función asignada por defecto: Salida de finalización de posicionamiento | |
| Cn4 | 1 | BRK+ | Polo positivo de salida de freno. | Interfaz para adaptar el freno mecánico (freno) del motor |
| 2 | BRK – | Polo negativo de salida de freno. |
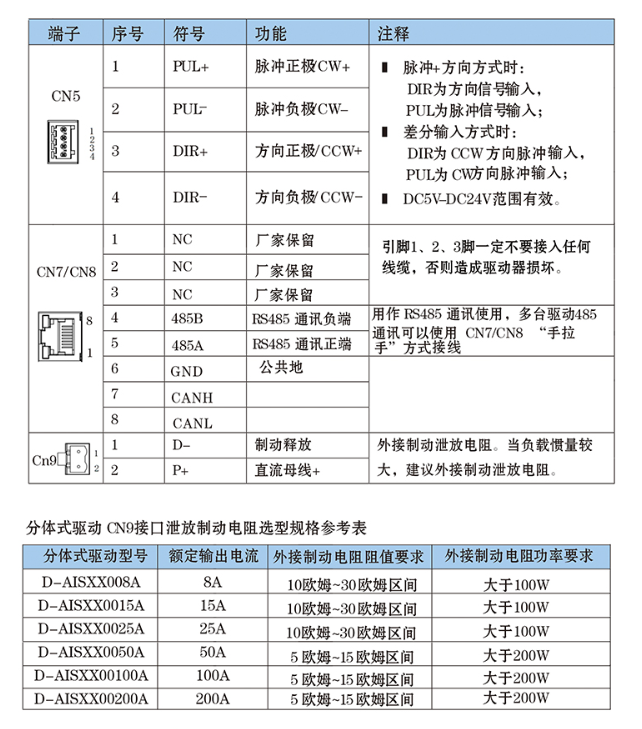
| Terminal | Número de serie | Símbolo | Función | Observaciones |
| CN5 | 1 | PUL+ | Polo positivo del pulso (CW+) | cuando esta en pulso + modo de dirección: DIR es la entrada de señal de dirección, y PUL es la entrada de señal de pulso; cuando está en modo de entrada diferencial: DIR es la entrada de pulso en dirección CCW, y PUL es la entrada de pulso en dirección CW; efectivo dentro del DC5V – Rango de 24 VCC |
| 2 | PUL – | Polo negativo del pulso (CW – ) | ||
| 3 | DIR+ | Polo de dirección positivo (CCW+) | ||
| 4 | dirección – | Polo de dirección negativo (CCW – ) | ||
| CN7/CN8 | 1 | CAROLINA DEL NORTE | Reservado por el fabricante | Patas 1, 2, y 3 no debe estar conectado a ningún cable, De lo contrario, el controlador se dañará. |
| 2 | CAROLINA DEL NORTE | Reservado por el fabricante | ||
| 3 | CAROLINA DEL NORTE | Reservado por el fabricante | ||
| 4 | 485B | Terminal negativo de comunicación RS485 | Utilizado para comunicación RS485. Se pueden conectar varias unidades en un “margarita – cadena” manera utilizando CN7/CN8 para comunicación RS485 | |
| 5 | 485A | Terminal positivo de comunicación RS485 | ||
| 6 | Tierra | Terreno común | ||
| 7 | SOPA | |||
| 8 | VIVIR | |||
| cn9 | 1 | D – | Liberación del freno | Conecte una resistencia de descarga de frenado externa. Cuando la inercia de la carga es grande., Se recomienda conectar una resistencia de descarga de frenado externa. |
| 2 | P+ | Autobús de CC + |
Tabla de referencia de especificación de selección para descargar la resistencia de frenado de Split – tipo Unidad Cn9 Interfaz
| Dividir – tipo Modelo de unidad | Corriente de salida nominal | Requisito de valor de resistencia de la resistencia de frenado externa | Requisito de potencia de la resistencia de frenado externa |
| D – AISXX008A | 8A | 10 ohmios – 30 rango de ohmios | Más de 100W |
| D – AISXX0015A | 15A | 10 ohmios – 30 rango de ohmios | Más de 100W |
| D – AISXX0025A | 25A | 10 ohmios – 30 rango de ohmios | Más de 100W |
| D – AISXX0050A | 50A | 5 ohmios – 15 rango de ohmios | Más de 200W |
| D – AISXX00100A | 100A | 5 ohmios – 15 rango de ohmios | Más de 200W |
| D – AISXX00200A | 200A | 5 ohmios – 15 rango de ohmios | Más de 200W |
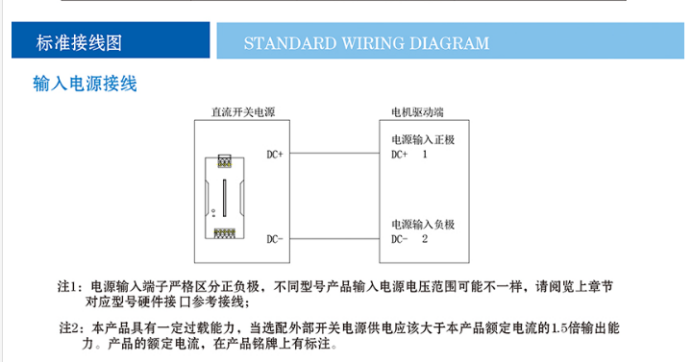
Diagrama de cableado estándar
Cableado de la fuente de alimentación de entrada
Nota 1: Los terminales de la fuente de alimentación de entrada deben distinguir estrictamente los polos positivo y negativo.. El rango de voltaje de la fuente de alimentación de entrada puede variar según los diferentes modelos.. Consulte el cableado de referencia de la interfaz de hardware para el modelo correspondiente en el capítulo anterior..
Nota 2: Este producto tiene una cierta capacidad de sobrecarga.. Al seleccionar una fuente de alimentación conmutada externa, La capacidad de producción debe ser 1.5 veces la corriente nominal de este producto. La corriente nominal del producto está indicada en la placa de características..
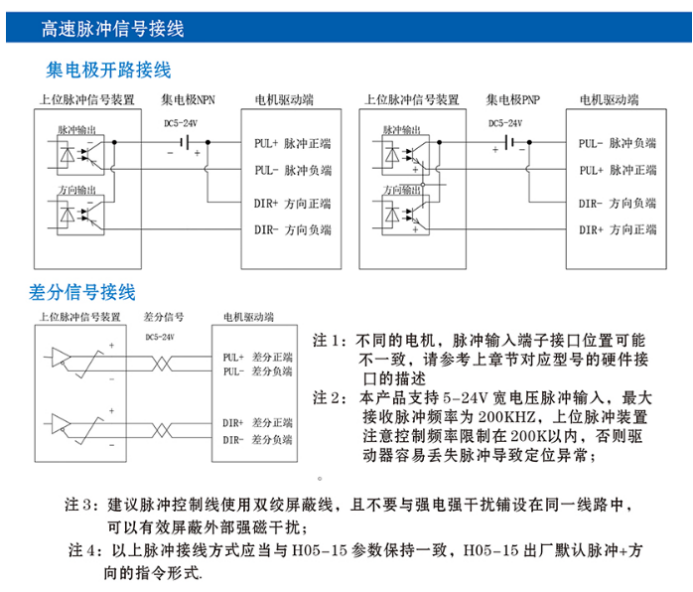
Alto – Cableado de señal de pulso de velocidad
Coleccionista – Cableado abierto
Cableado de señal diferencial
Nota 1: Para diferentes motores, Las posiciones de la interfaz de los terminales de entrada de pulsos pueden variar.. Consulte la descripción de la interfaz de hardware del modelo correspondiente en el capítulo anterior..
Nota 2: Este producto admite entrada de pulsos con un amplio rango de voltaje de 5 – 24V, Y la frecuencia máxima de pulso recibida es 200KHZ. la parte superior – El dispositivo de pulso de nivel debe prestar atención a limitar la frecuencia a 200 K para evitar que el conductor pierda pulsos fácilmente y cause anomalías de posicionamiento..
Nota 3: Se recomienda utilizar doble – cables blindados para líneas de control de pulso y evite colocarlos en el mismo circuito que cables fuertes – fuentes de interferencia actuales, que puede proteger eficazmente fuertes interferencias magnéticas externas.
Nota 4: Los métodos de conexión de pulsos anteriores deben ser consistentes con el H05. – 15 parámetros. El valor predeterminado de fábrica para H05 – 15 es pulso + modo de comando de dirección.
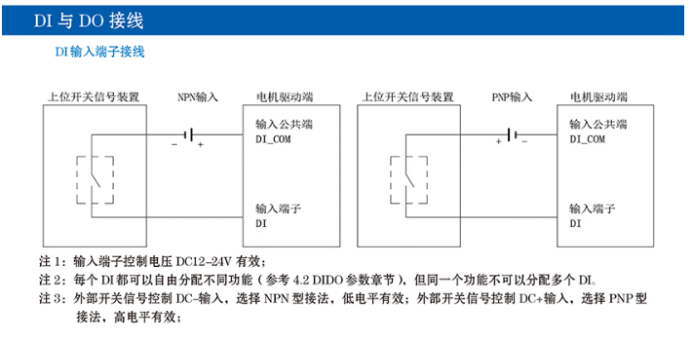
Cableado DI y DO
Cableado del terminal de entrada AT
Nota 1: El voltaje de control de los terminales de entrada es válido en DC12 – 24V.
Nota 2: A cada DI se le pueden asignar libremente diferentes funciones (referirse a la 4.2 Sección de parámetros DIDO), pero la misma función no se puede asignar a múltiples DI.
Nota 3: Para control de señal de interruptor externo con CC – aporte, seleccione el NPN – tipo método de conexión, donde bajo – el nivel es efectivo; para control de señal de interruptor externo con entrada DC+, seleccione el PNP – tipo método de conexión, donde alto – el nivel es efectivo.
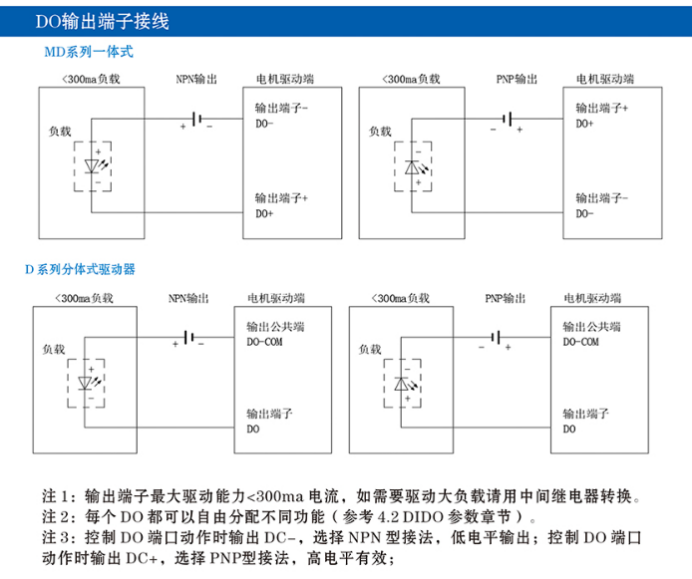
Cableado del terminal de salida DO
Nota 1: La capacidad máxima de accionamiento de los terminales de salida es <300mi actual. Si es necesario conducir una carga grande, Se debe utilizar un relé para la conversión..
Nota 2: A cada DO se le pueden asignar libremente diferentes funciones (referirse a la 4.2 Sección de parámetros DIDO).
Nota 3: Al controlar la acción del puerto DO, si CC – es salida, seleccione el NPN – tipo método de conexión, donde bajo – La salida de nivel es efectiva.; si sale DC+, seleccione el PNP – tipo método de conexión, donde alto – La salida de nivel es efectiva..
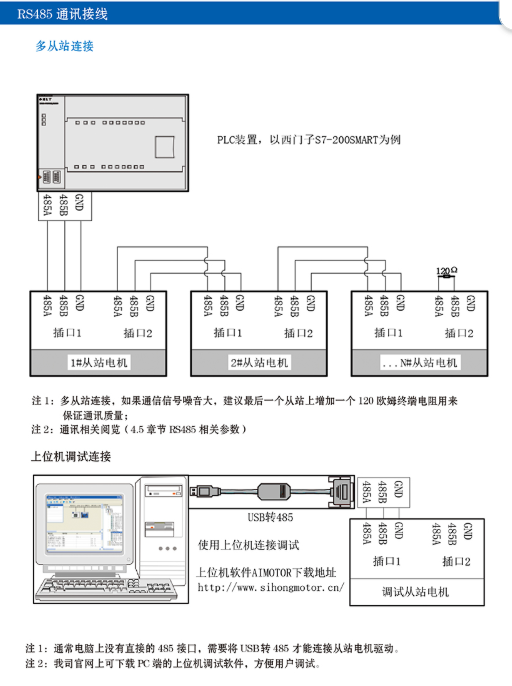
Cableado de comunicación RS485
Multi – Conexión esclava
Nota 1: Para múltiples – conexión esclava, si el ruido de la señal de comunicación es grande, se recomienda agregar un 120 – Resistencia terminal de ohmios al último esclavo para garantizar la calidad de la comunicación..
Nota 2: Para la comunicación – contenido relacionado, referirse a (sección 4.5 RS485 – parámetros relacionados).
Conexión de depuración del ordenador host
Nota 1: Generalmente, una computadora no tiene una conexión directa 485 interfaz, y un USB – a – 485 Se requiere un convertidor para conectarse al variador del motor esclavo..
Nota 2: El software de depuración del ordenador host para PC se puede descargar desde el sitio web oficial de nuestra empresa., lo cual es conveniente para que los usuarios depuren.