


D – AIS24008A Faible – Pilote de servomoteur intelligent de tension

$0.00
Paramètres techniques
- Description
Description
D – AIS24008A Faible – Pilote de servomoteur intelligent de tension
Détails du produit
Il présente une forte stabilité, haut – positionnement de précision, réponse motrice élevée, faible bruit, faible génération de chaleur, bien – conception structurée, forte capacité de surcharge, fonctions pratiques et riches, et application simple et pratique. Il dispose de protections contre plus – tension, sous – tension, survitesse, sur – actuel, surcharge, anomalies du codeur, écart de position, décrochage, anomalies des paramètres, etc..
Spécifications techniques
| Modèle de lecteur | Plage de tension (V) | Courant nominal (UN) |
| D – AIS24008A | 24 – 36 | 8 |
| D – AIS48015A | 24 – 48 | 15 |
| D – AIS48025A | 24 – 60 | 25 |
| D – AIS48050A | 24 – 72 | 50 |
| D – AIS48100A | 36 – 72 | 100 |
| D – AIS72200A | 48 – 96 | 200 |
| D – AIS72300A | 48 – 96 | 300 |
| Méthode de contrôle | ① Contrôle de position ② Contrôle de vitesse ③ Contrôle de couple ④ Contrôle de communication |
| Caractéristiques de contrôle | Réponse en fréquence vitesse: ≥200Hz, Fréquence d'impulsion reçue ≤200kHz, Taux de fluctuation de vitesse: < ±0,03 (Charger 0 – 100%): < ±0,02×(0.9 – 1.1) Tension d'alimentation |
| Fonction de surveillance | Vitesse actuelle, Entrée DI, DO Sortie, Poste actuel, Accumulation d’impulsions d’entrée de commande, Taux de charge moyen, Nombre d'écarts de position, Courant de phase du moteur, Valeur de tension du bus, Température du module, Enregistrement d'alarme, Fréquence d'impulsion de commande Vitesse correspondante, État de fonctionnement, etc.. |
| Maison – Fonction de retour | 13 Types d'autonomie (Recherche) Maison – Modes de retour, et Accueil – Fonction de décalage de point |
| Fonction Rs485 | Suit le Modbus standard – Protocole Rtu, Un – à – Deux Deux – Interface de communication pour une mise en réseau facile et une connexion parallèle |
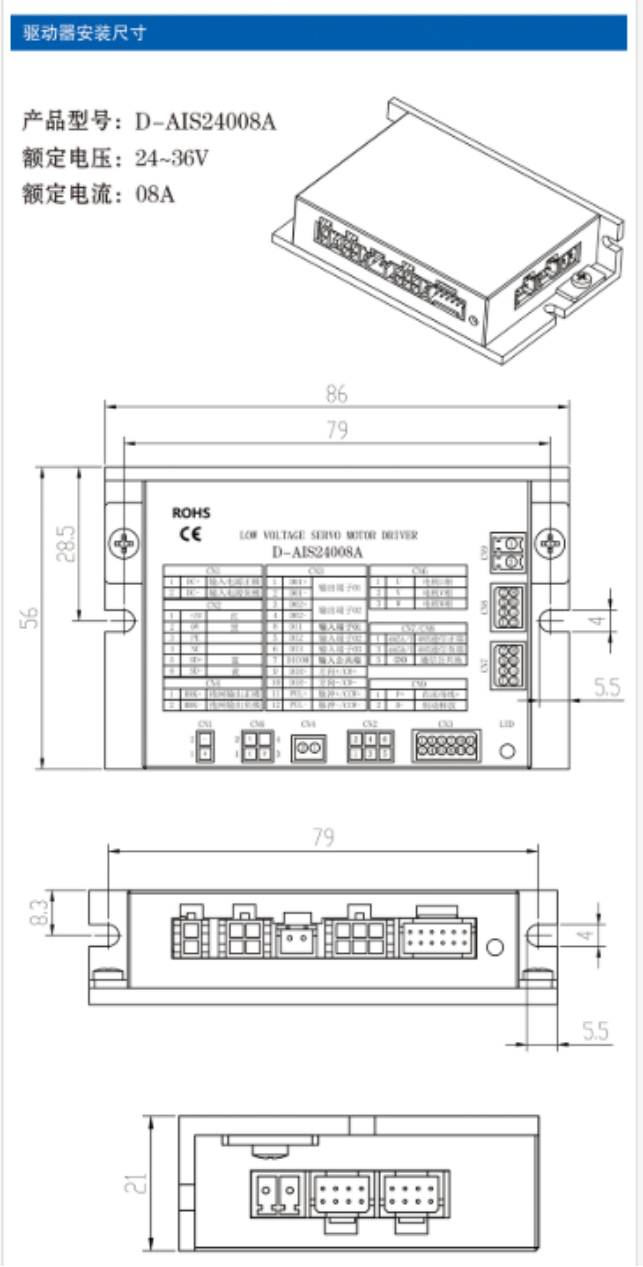
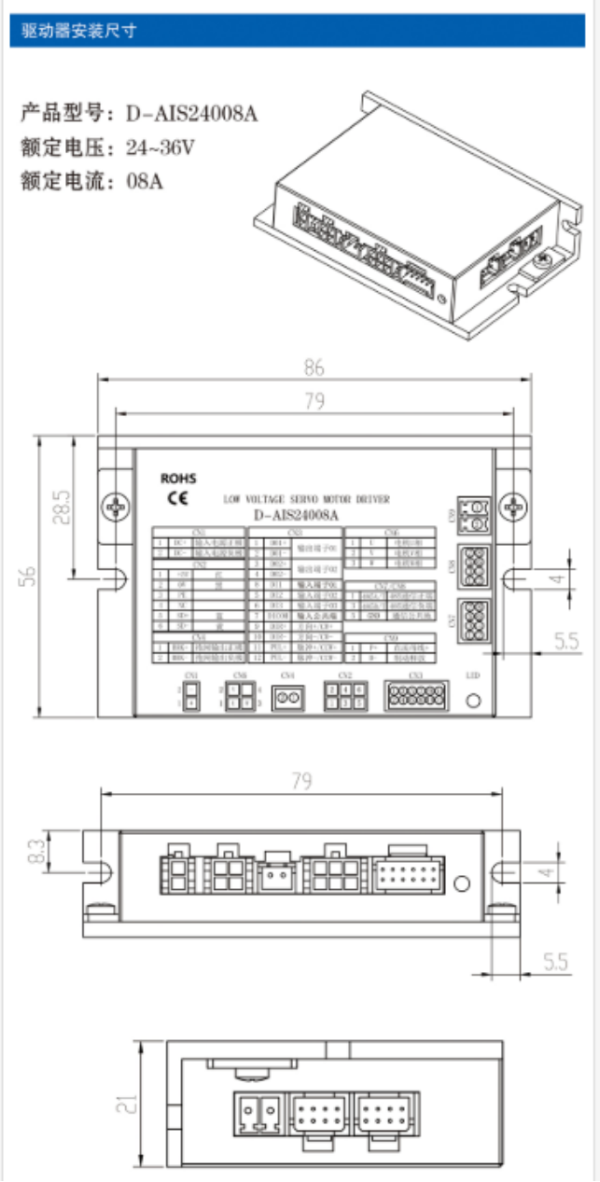
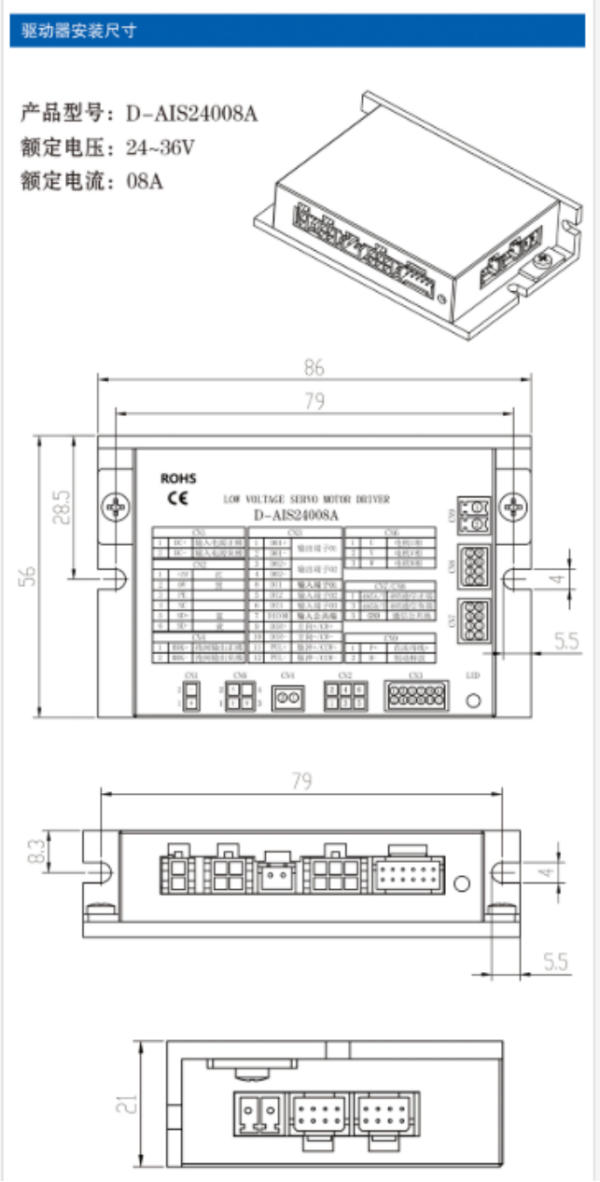
Dimensions d'installation du pilote
Modèle de produit: D – AIS24008A
Tension nominale: 24 – 36V
Courant nominal: 08UN
Diviser – type Interface matérielle du lecteur
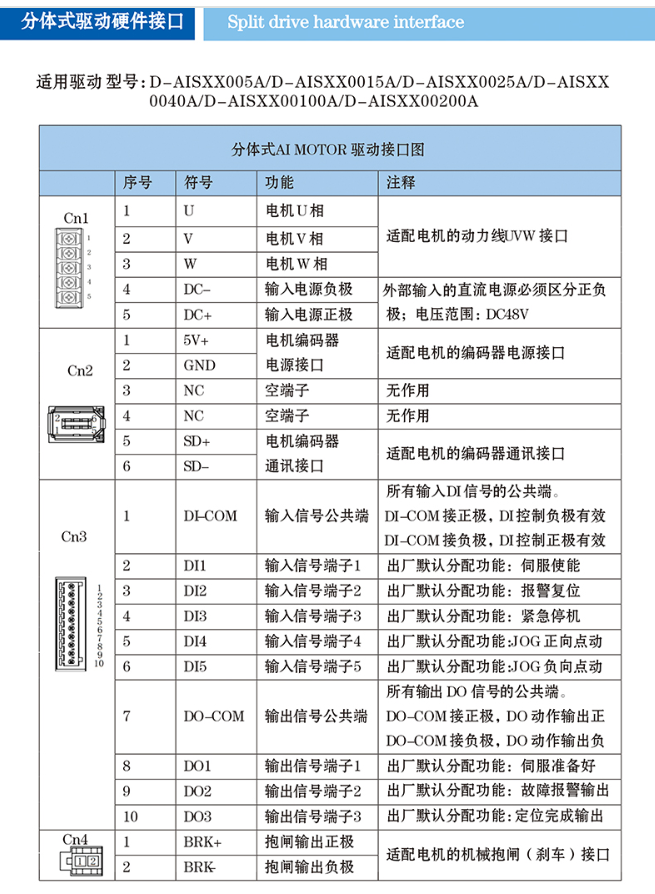
Modèles de variateurs applicables: D – AISXX005A / D – AISXX0015A / D – AISXX0025A / D – AISXX0040A / D – AISXX00100A / D – AISXX00200A
Diviser – Schéma d'interface d'entraînement de moteur AI
| Numéro de série | Symbole | Fonction | Remarques | |
| CN1 | 1 | U | Moteur U – phase | Câble d'alimentation interface JVW pour adaptation du moteur |
| 2 | V | Moteur V – phase | ||
| 3 | W | Moteur W – phase | ||
| 4 | DC – | Pôle négatif de l'alimentation d'entrée | L'alimentation CC d'entrée externe doit distinguer les pôles positifs et négatifs; plage de tension: DC48V | |
| 5 | CC+ | Pôle positif de l'alimentation d'entrée | ||
| CN2 | 1 | 5V+ | Interface d'alimentation du codeur moteur | Interface de puissance pour adapter le codeur moteur |
| 2 | GND | Interface d'alimentation | ||
| 3 | Caroline du Nord | Borne vide | Aucune fonction | |
| 4 | Caroline du Nord | Borne vide | Aucune fonction | |
| 5 | SD+ | Interface de communication codeur moteur | Interface de communication pour adapter le codeur moteur | |
| 6 | SD – | |||
| CN3 | 1 | DEPUIS – COM | Borne commune des signaux d'entrée | Borne commune pour tous les signaux d'entrée DI. Quand DI – COM est connecté au pôle positif, le contrôle négatif de DI est efficace; quand IN – COM est connecté au pôle négatif, le contrôle positif de DI est efficace |
| 2 | Di1 | Borne de signal d'entrée 1 | Usine – fonction attribuée par défaut: Activation des servos | |
| 3 | DI2 | Borne de signal d'entrée 2 | Usine – fonction attribuée par défaut: Réinitialisation de l'alarme | |
| 4 | DI3 | Borne de signal d'entrée 3 | Usine – fonction attribuée par défaut: Arrêt d'urgence | |
| 5 | DI4 | Borne de signal d'entrée 4 | Usine – fonction attribuée par défaut: JOG jogging positif | |
| 6 | DI5 | Borne de signal d'entrée 5 | Usine – fonction attribuée par défaut: JOG jogging négatif | |
| 7 | FAIRE – COM | Borne commune des signaux de sortie | Borne commune pour tous les signaux de sortie DO. Quand FAIRE – COM est connecté au pôle positif, le résultat positif de l’action DO est efficace; quand FAIRE – COM est connecté au pôle négatif, le résultat négatif de l’action DO est efficace | |
| 8 | FAIRE1 | Borne de signal de sortie 1 | Usine – fonction attribuée par défaut: Servo prêt | |
| 9 | DO2 | Borne de signal de sortie 2 | Usine – fonction attribuée par défaut: Sortie d'alarme de défaut | |
| 10 | DO3 | Borne de signal de sortie 3 | Usine – fonction attribuée par défaut: Sortie d'achèvement du positionnement | |
| Cn4 | 1 | BRK+ | Pôle positif de sortie de frein | Interface pour adapter le frein mécanique (frein) du moteur |
| 2 | BRK – | Pôle négatif de sortie de frein |
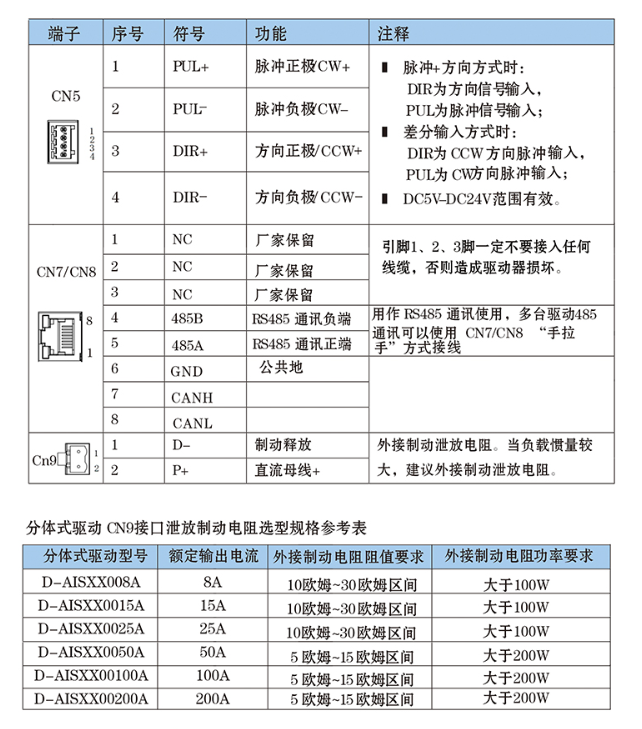
| Terminal | Numéro de série | Symbole | Fonction | Remarques |
| CN5 | 1 | PUL+ | Pôle positif de l'impulsion (CW+) | Quand j'ai le pouls + mode de direction: DIR est l'entrée du signal de direction, et PUL est l'entrée du signal d'impulsion; en mode d'entrée différentielle: DIR est l'entrée d'impulsion de direction CCW, et PUL est l'entrée d'impulsion de direction CW; efficace dans le DC5V – Gamme DC24V |
| 2 | PUL – | Pôle négatif du pouls (CW – ) | ||
| 3 | DIR+ | Pôle de direction positif (CCW+) | ||
| 4 | DIR – | Pôle de direction négatif (CCW – ) | ||
| CN7/CN8 | 1 | Caroline du Nord | Réservé par le fabricant | Épingles 1, 2, et 3 ne doit être connecté à aucun fil, sinon le conducteur sera endommagé |
| 2 | Caroline du Nord | Réservé par le fabricant | ||
| 3 | Caroline du Nord | Réservé par le fabricant | ||
| 4 | 485B | Borne négative de communication RS485 | Utilisé pour la communication RS485. Plusieurs lecteurs peuvent être câblés dans un “marguerite – chaîne” manière utilisant CN7/CN8 pour la communication RS485 | |
| 5 | 485UN | Borne positive de communication RS485 | ||
| 6 | GND | Terrain d'entente | ||
| 7 | SOUPE | |||
| 8 | EN DIRECT | |||
| Cn9 | 1 | D – | Desserrage des freins | Connecter une résistance de décharge de freinage externe. Lorsque l'inertie de la charge est grande, il est recommandé de connecter une résistance de décharge de freinage externe |
| 2 | P+ | Bus CC + |
Tableau de référence des spécifications de sélection pour la décharge de la résistance de freinage de Split – type Lecteur Interface Cn9
| Diviser – type Modèle de lecteur | Courant de sortie nominal | Exigence relative à la valeur de résistance de la résistance de freinage externe | Exigence de puissance de la résistance de freinage externe |
| D – AISXX008A | 8UN | 10 ohms – 30 plage d'ohms | Supérieur à 100W |
| D – AISXX0015A | 15UN | 10 ohms – 30 plage d'ohms | Supérieur à 100W |
| D – AISXX0025A | 25UN | 10 ohms – 30 plage d'ohms | Supérieur à 100W |
| D – AISXX0050A | 50UN | 5 ohms – 15 plage d'ohms | Supérieur à 200W |
| D – AISXX00100A | 100UN | 5 ohms – 15 plage d'ohms | Supérieur à 200W |
| D – AISXX00200A | 200UN | 5 ohms – 15 plage d'ohms | Supérieur à 200W |
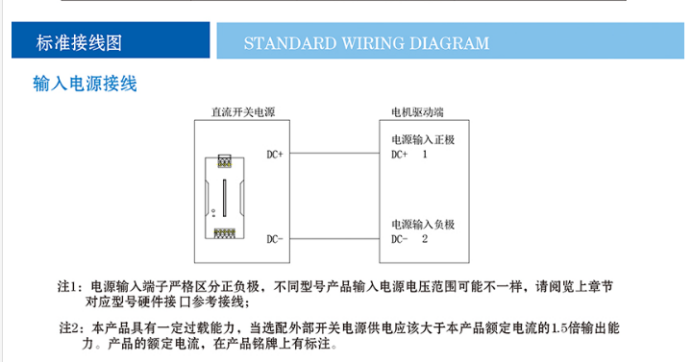
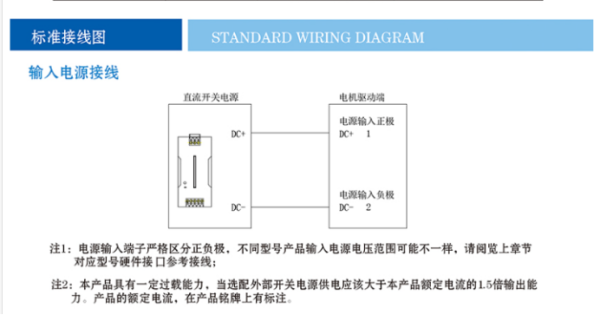
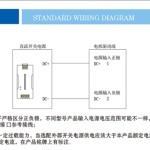
Schéma de câblage standard
Câblage de l'alimentation d'entrée
Note 1: Les bornes d'alimentation d'entrée doivent distinguer strictement les pôles positifs et négatifs. La plage de tension d'alimentation d'entrée peut varier selon les modèles. Veuillez vous référer au câblage de référence de l'interface matérielle pour le modèle correspondant dans le chapitre précédent..
Note 2: Ce produit a une certaine capacité de surcharge. Lors de la sélection d'une alimentation à découpage externe, la capacité de sortie doit être 1.5 fois le courant nominal de ce produit. Le courant nominal du produit est indiqué sur la plaque signalétique.
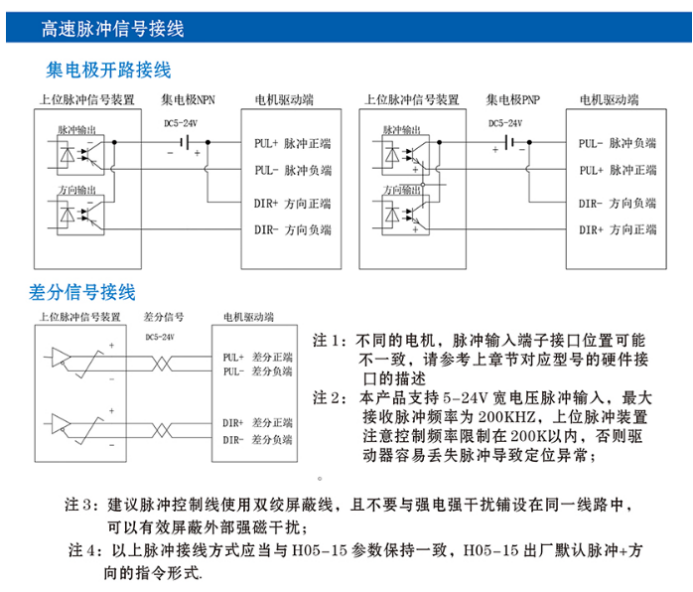
Haut – Câblage du signal d'impulsion de vitesse
Collectionneur – Câblage ouvert
Câblage du signal différentiel
Note 1: Pour différents moteurs, les positions d'interface des bornes d'entrée d'impulsions peuvent varier. Veuillez vous référer à la description de l'interface matérielle du modèle correspondant dans le chapitre précédent.
Note 2: Ce produit prend en charge l'entrée d'impulsions avec une large plage de tension de 5 – 24V, et la fréquence d'impulsion maximale reçue est de 200 KHZ. Le supérieur – le dispositif d'impulsion de niveau doit veiller à limiter la fréquence à moins de 200K pour empêcher le conducteur de perdre facilement les impulsions et de provoquer des anomalies de positionnement.
Note 3: Il est recommandé d'utiliser le double – fils blindés pour les lignes de commande d'impulsions et évitez de les poser dans le même circuit que les lignes fortes – sources d'interférences actuelles, qui peut protéger efficacement les fortes interférences magnétiques externes.
Note 4: Les méthodes de connexion d'impulsions ci-dessus doivent être cohérentes avec le H05 – 15 paramètres. Le réglage d'usine par défaut pour H05 – 15 est le pouls + mode de commande de direction.
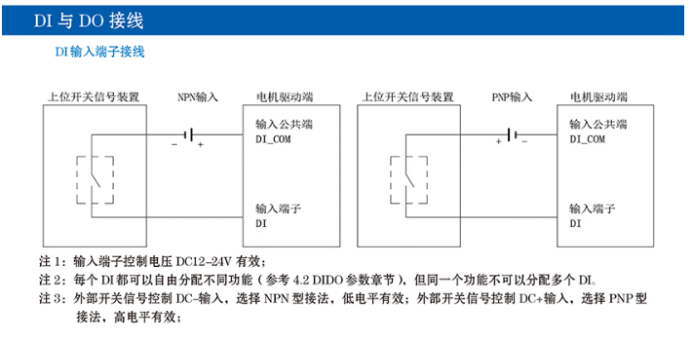
Câblage DI et DO
Câblage de la borne d'entrée AT
Note 1: La tension de commande des bornes d'entrée est valable à DC12 – 24V.
Note 2: Chaque DI peut se voir attribuer librement différentes fonctions (se référer au 4.2 Section des paramètres DIDO), mais la même fonction ne peut pas être attribuée à plusieurs DI.
Note 3: Pour le contrôle du signal de commutation externe avec DC – saisir, sélectionnez le NPN – tapez la méthode de connexion, où bas – le niveau est efficace; pour commande de signal de commutation externe avec entrée DC+, sélectionnez le PNP – tapez la méthode de connexion, où haut – le niveau est efficace.
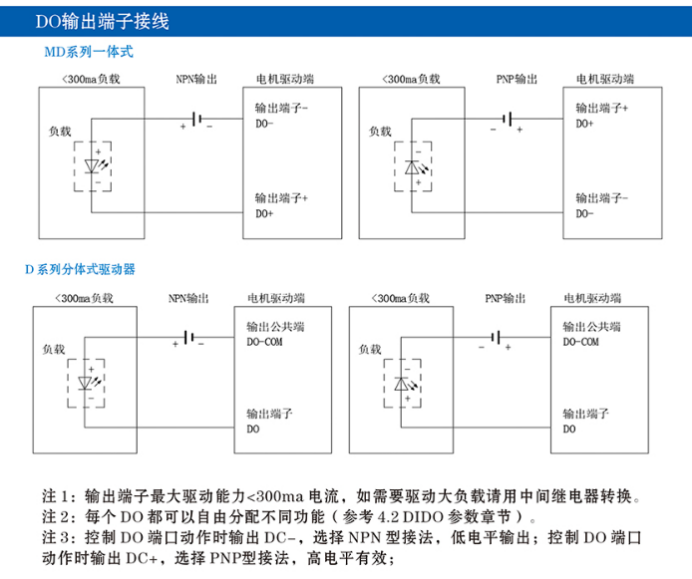
Câblage du terminal de sortie DO
Note 1: La capacité de conduite maximale des bornes de sortie est <300mon courant. Si une charge importante doit être transportée, un relais doit être utilisé pour la conversion.
Note 2: Chaque DO peut se voir attribuer librement différentes fonctions (se référer au 4.2 Section des paramètres DIDO).
Note 3: Lors du contrôle de l'action du port DO, si DC – est la sortie, sélectionnez le NPN – tapez la méthode de connexion, où bas – le niveau de sortie est efficace; si DC+ est sorti, sélectionnez le PNP – tapez la méthode de connexion, où haut – le niveau de sortie est efficace.
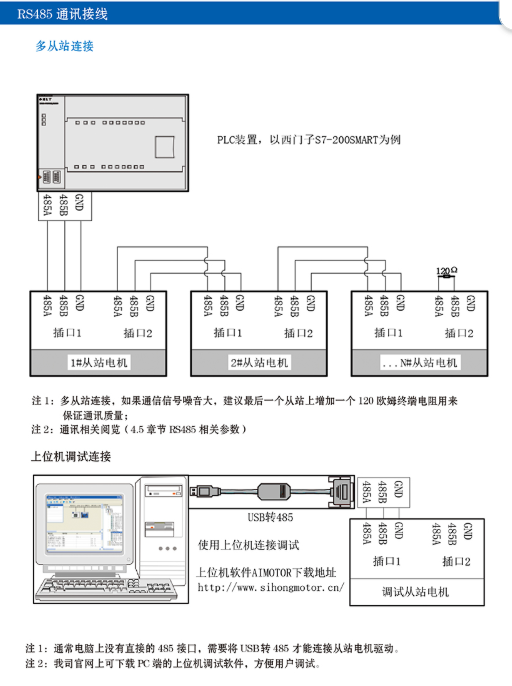
Câblage de communication RS485
Multi – Connexion esclave
Note 1: Pour plusieurs – connexion esclave, si le bruit du signal de communication est important, il est recommandé d'ajouter un 120 – résistance terminale ohm au dernier esclave pour assurer la qualité de la communication.
Note 2: Pour communiquer – contenu connexe, se référer à (section 4.5 RS485 – paramètres associés).
Connexion de débogage de l'ordinateur hôte
Note 1: Généralement, un ordinateur n'a pas de connexion directe 485 interface, et une clé USB – à – 485 Un convertisseur est nécessaire pour se connecter au variateur de vitesse esclave..
Note 2: Le logiciel de débogage de l'ordinateur hôte pour PC peut être téléchargé à partir du site officiel de notre société., ce qui est pratique pour les utilisateurs de déboguer.