

Diviser – Type de servomoteur CC pour bus EtherCAT D – AIS4815E/D – AIS4825E

$0.00
Paramètres techniques
- Description
Description

Diviser – Type de servomoteur CC pour bus EtherCAT D – AIS4815E/D – AIS4825E
Détails du produit
Le driver AIMOTOR adopte une interface de communication bus EtherCAT, intégrant la technologie de station esclave EtherCAT, technologie de contrôle vectoriel, construit – dans le processeur de la station esclave ESC, technologie de filtrage adaptatif, et fermé – technologie de contrôle de boucle. Il réalise le réel – contrôle du temps et réel – transmission des données temporelles du système, optimiser les performances du moteur. Il a une excellente stabilité et ultra – faible bruit; La technologie de contrôle vectoriel à courant sinusoïdal pur, douce et précise, réduit efficacement l'échauffement du moteur..
Spécifications techniques
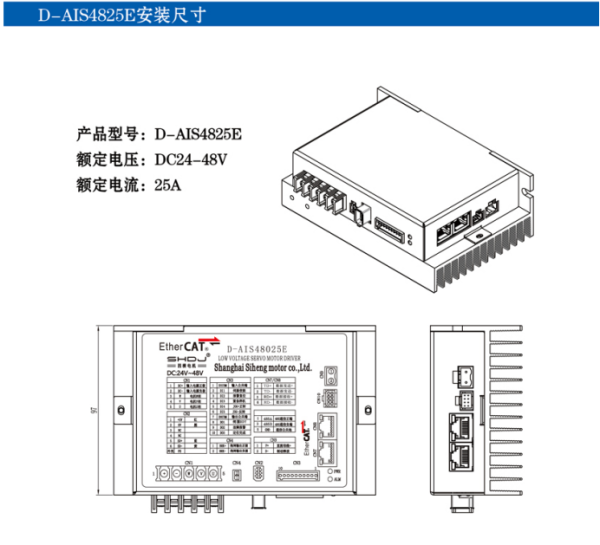
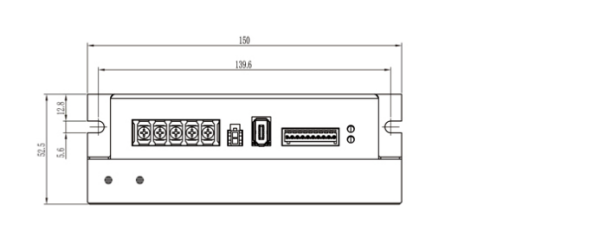
| Paramètre du modèle | D – AIS4815E | DEPUIS – AIS4825E |
| Alimentation d'entrée | 24VCC – 60VCC | 24VCC – 60VCC |
| Courant nominal | 15UN | 25UN |
| Courant de pointe | 25UN | 50UN |
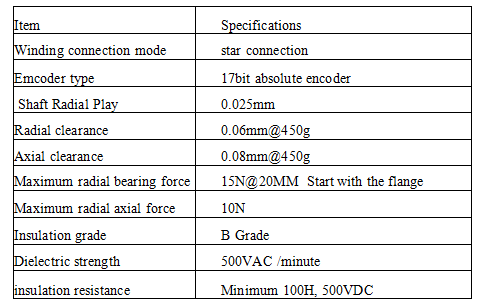
| Signal de rétroaction | 17 – Codeur absolu à bits | |
| Énergie – consommer du freinage | La résistance de freinage externe peut être connectée | |
| Fonction de protection | Sur – Protection de tension, Sous – Protection de tension, Protection contre les surcharges, Protection contre la surchauffe du conducteur, etc.. | |
| Méthode de refroidissement | Refroidissement naturel par air | |
| Entrée numérique | 5 – façon entrée numérique (Les fonctions du terminal peuvent être définies) | |
| Sortie numérique | 3 – façon Sortie Numérique (Les fonctions du terminal peuvent être définies) | |
| Modbus/RS485 | Débit en bauds maximum pris en charge | |
| ÉtherCat | Prend en charge le CoE (Protocole CiA402) et modes CSP/CSV/PP/PV/PT/HM, Vitesse de communication 100M | |
| Température de fonctionnement | 0 – 40°C | |
| Température de stockage | – 10°C – 70°C |
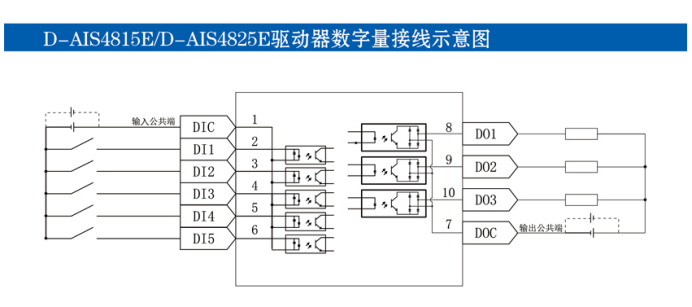
D – AIS4815E/D – Schéma schématique de câblage numérique du pilote AIS4825E
D – AIS4815E/D – Description du port de câblage du pilote AIS4825E
CN1: Alimentation et interface de ligne de phase moteur
| Numéro de broche | Symbole | Fonction |
| 1 | + | Puissance d'entrée positive |
| 2 | – | Puissance d'entrée négative |
| 3 | W | Moteur W – phase |
| 4 | V | Moteur V – phase |
| 5 | U | Moteur U – phase |
CN2: Interface d'encodeur de moteur
| Numéro de broche | Symbole | Fonction |
| 1 | +5V | 5Sortie V |
| 2 | 0V | 0Sortie V |
| 3 | Caroline du Nord | Réservé |
| 4 | Caroline du Nord | Réservé |
| 5 | SD+ | Transmission de données |
| 6 | SD- | Réception de données |
| 7 | PE | Sol |
CN4: Interface de frein moteur
| Numéro de broche | Symbole | Fonction |
| 1 | BRK+ | Sortie de frein + |
| 2 | BRK- | Sortie de frein – |
CN3: Interface d'entrée et de sortie de signal numérique
| Numéro de broche | Symbole | Fonction |
| 1 | DICOM | Borne commune d'entrée |
| 2 | DI12 | Réinitialisation de l'alarme |
| 3 | DI13 | Arrêt d'urgence |
| 4 | DI14 | FAIRE DU JOGGING – Positif |
| 5 | DI15 | FAIRE DU JOGGING – Inverse |
| 6 | DOCOM | Borne commune de sortie |
| 7 | FAIRE1 | Prêt pour les servos |
| 8 | DO2 | Alarme de défaut |
| 9 | DO3 | Achèvement du positionnement |
CN7/CN8: Interface de communication par bus
| Numéro de broche | ÉtherCat |
| 1 | TD+ |
| 2 | TD- |
| 3 | RD+ |
| 4 | \ |
| 5 | \ |
| 6 | DR- |
| 7 | \ |
| 8 | \ |
CN9: Interface de décharge de freinage
| Numéro de broche | Symbole | Fonction |
| 1 | P+ | Bus CC + |
| 2 | D- | Libération du freinage |
CN10: 485 Interface de communication
| Numéro de broche | 485 Interface |
| 1 | 485UN |
| 2 | 485B |
| 3 | GND |
| 4 | 485B |
| 5 | Caroline du Nord |
| 6 | Caroline du Nord |
| 7 | Caroline du Nord |
| 8 | Caroline du Nord |
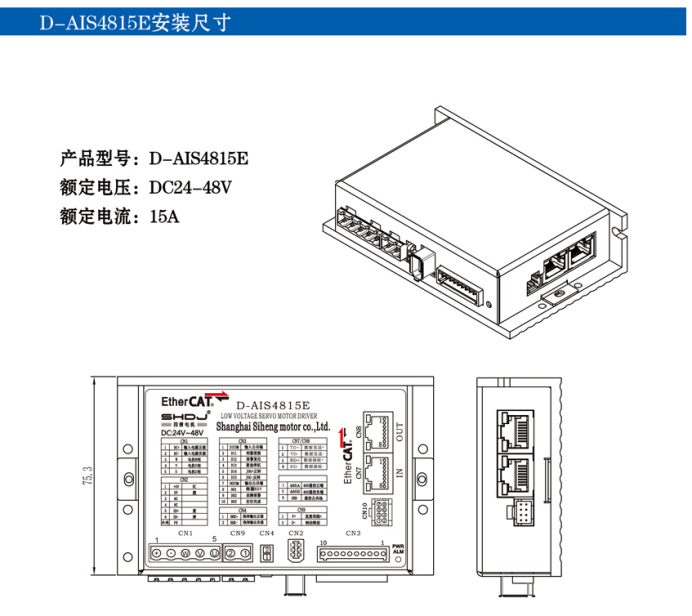
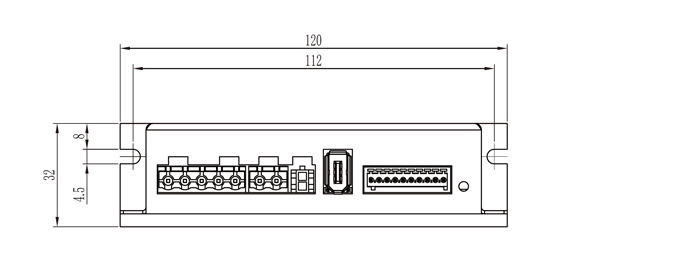
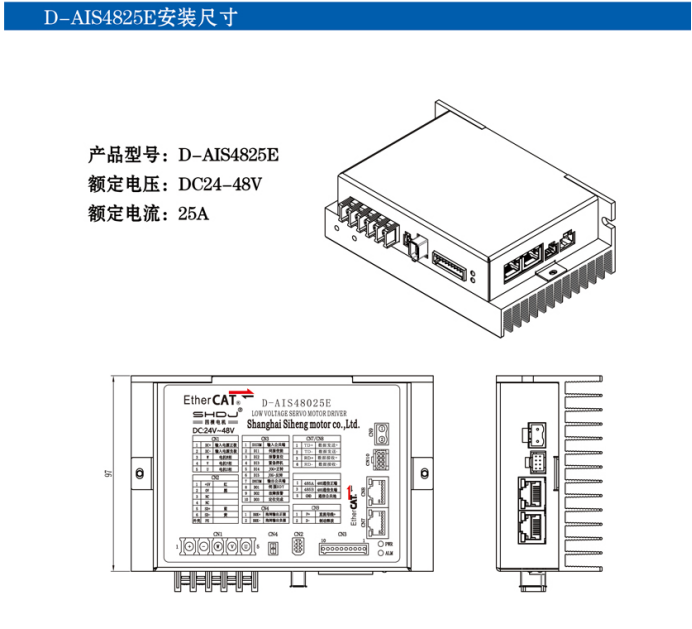
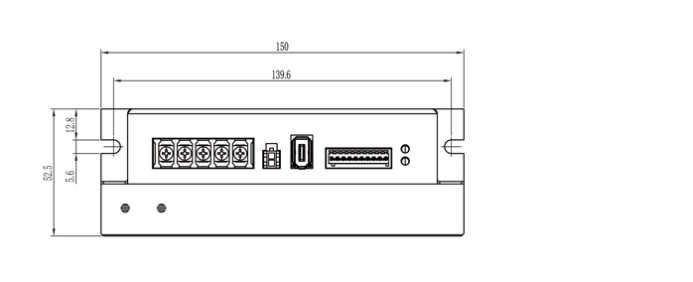
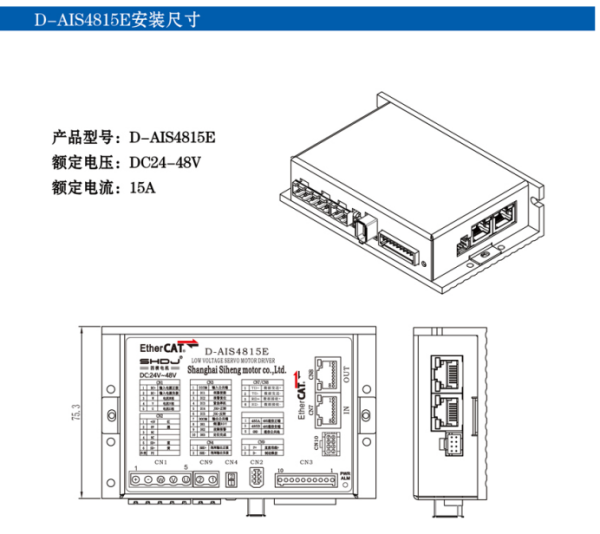
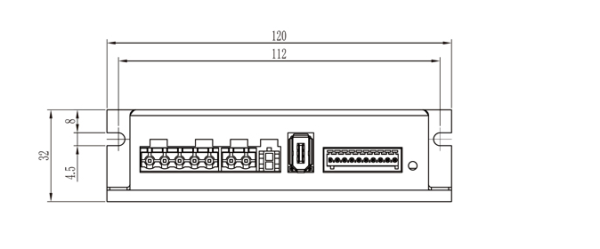
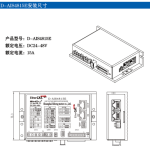
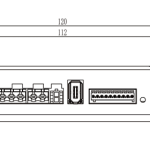
D – Dimensions d'installation de l'AIS4815E
Modèle de produit: D – AIS4815E
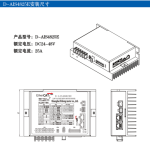
Tension nominale: DC24 – 48V
Courant nominal: 15UN