


D – AIS24008A Thấp – Trình điều khiển động cơ servo thông minh điện áp

$0.00
Thông số kỹ thuật
- Sự miêu tả
Sự miêu tả
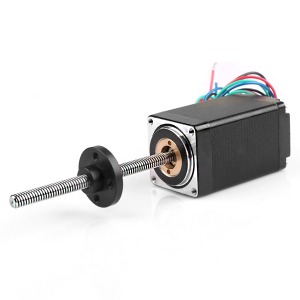
D – AIS24008A Thấp – Trình điều khiển động cơ servo thông minh điện áp
Chi tiết sản phẩm
Nó có tính năng ổn định mạnh mẽ, cao – định vị chính xác, phản ứng động cơ cao, tiếng ồn thấp, sinh nhiệt thấp, khỏe – thiết kế có cấu trúc, khả năng quá tải mạnh mẽ, chức năng thiết thực và phong phú, và ứng dụng đơn giản và thuận tiện. Nó có sự bảo vệ chống lại hơn – điện áp, dưới – điện áp, chạy quá tốc độ, qua – hiện hành, quá tải, bất thường bộ mã hóa, độ lệch vị trí, quầy hàng, tham số bất thường, vân vân.
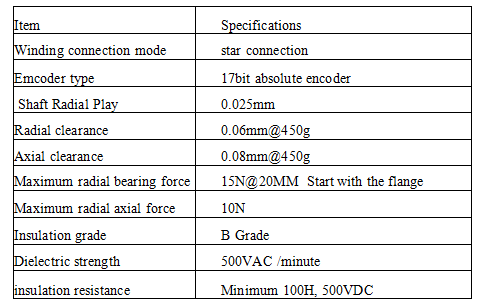
Thông số kỹ thuật
| Mô hình ổ đĩa | Dải điện áp (V) | Xếp hạng hiện tại (MỘT) |
| D – AIS24008A | 24 – 36 | 8 |
| D – AIS48015A | 24 – 48 | 15 |
| D – AIS48025A | 24 – 60 | 25 |
| D – AIS48050A | 24 – 72 | 50 |
| D – AIS48100A | 36 – 72 | 100 |
| D – AIS72200A | 48 – 96 | 200 |
| D – AIS72300A | 48 – 96 | 300 |
| Phương pháp kiểm soát | ① Kiểm soát vị trí ② Kiểm soát tốc độ ③ Kiểm soát mô-men xoắn ④ Kiểm soát giao tiếp |
| Đặc điểm điều khiển | Đáp ứng tần số tốc độ: ≥200Hz, Tần số xung nhận được 200kHz, Tốc độ dao động tốc độ: < ±0,03 (Trọng tải 0 – 100%): < ±0,02×(0.9 – 1.1) Điện áp cung cấp điện |
| Chức năng giám sát | Tốc độ hiện tại, Đầu vào DI, Đầu ra DO, Vị trí hiện tại, Tích lũy xung đầu vào lệnh, Tốc độ tải trung bình, Đếm độ lệch vị trí, Dòng điện pha động cơ, Giá trị điện áp xe buýt, Nhiệt độ mô-đun, Bản ghi báo động, Tốc độ tương ứng với tần số xung lệnh, Trạng thái hoạt động, vân vân. |
| Trang chủ – hàm trả về | 13 Các loại tự chủ (Tìm kiếm) Trang chủ – Chế độ trả về, và Trang chủ – Chức năng bù điểm |
| Chức năng Rs485 | Tuân theo Modbus tiêu chuẩn – Giao thức Rtu, Một – ĐẾN – hai hai – Giao diện truyền thông để kết nối mạng và song song dễ dàng |
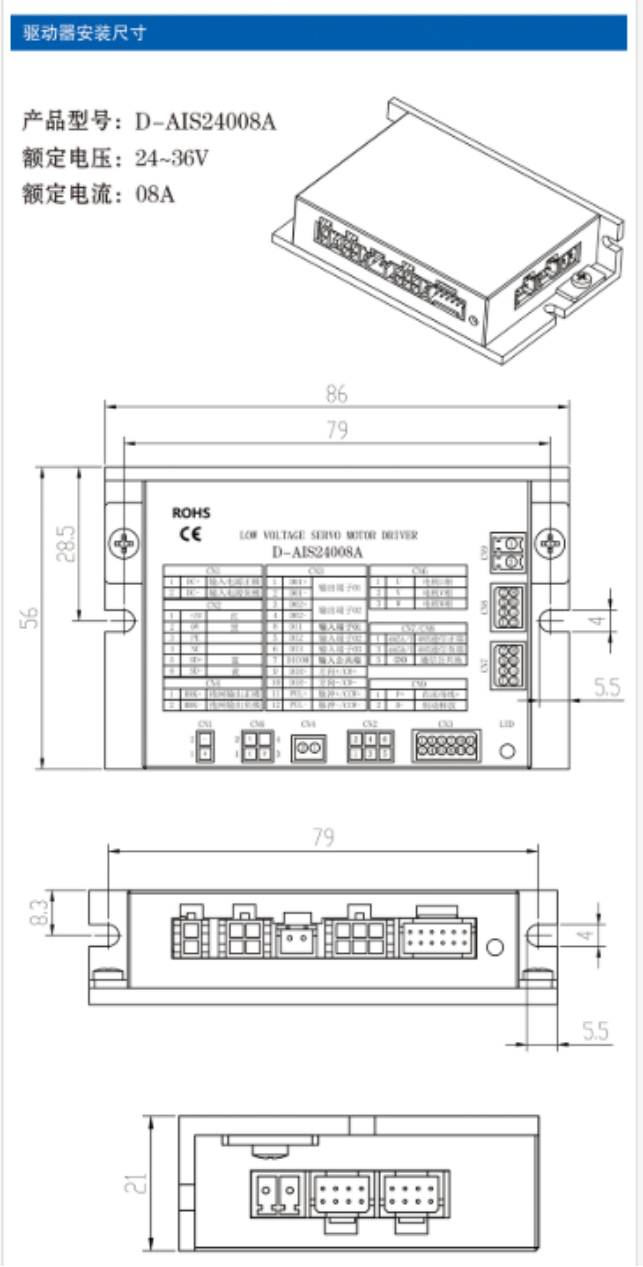
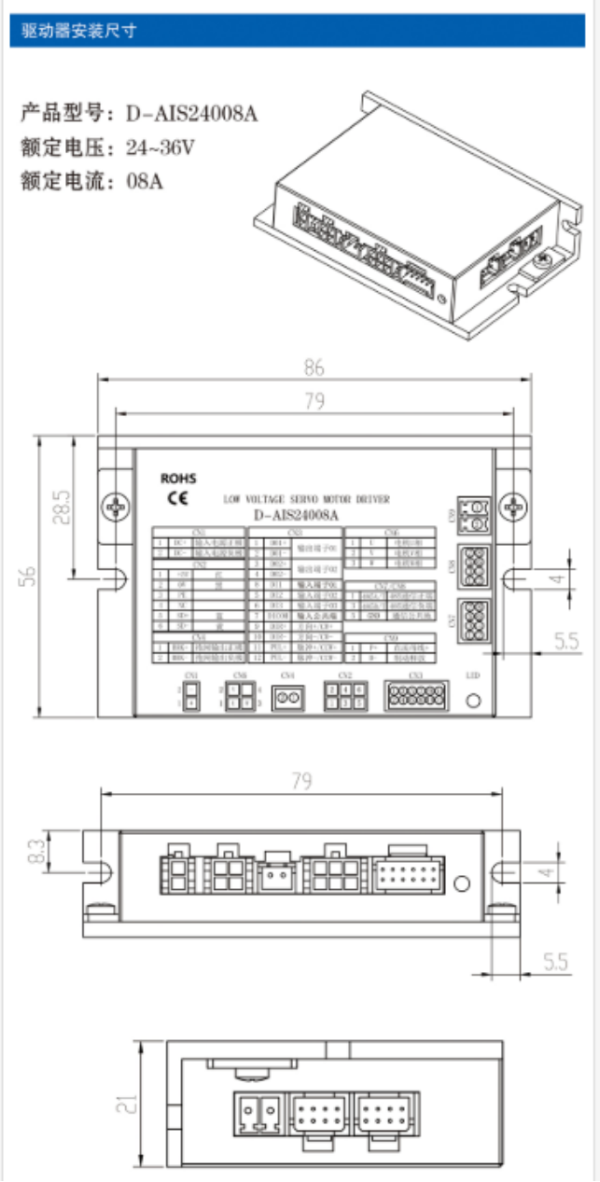
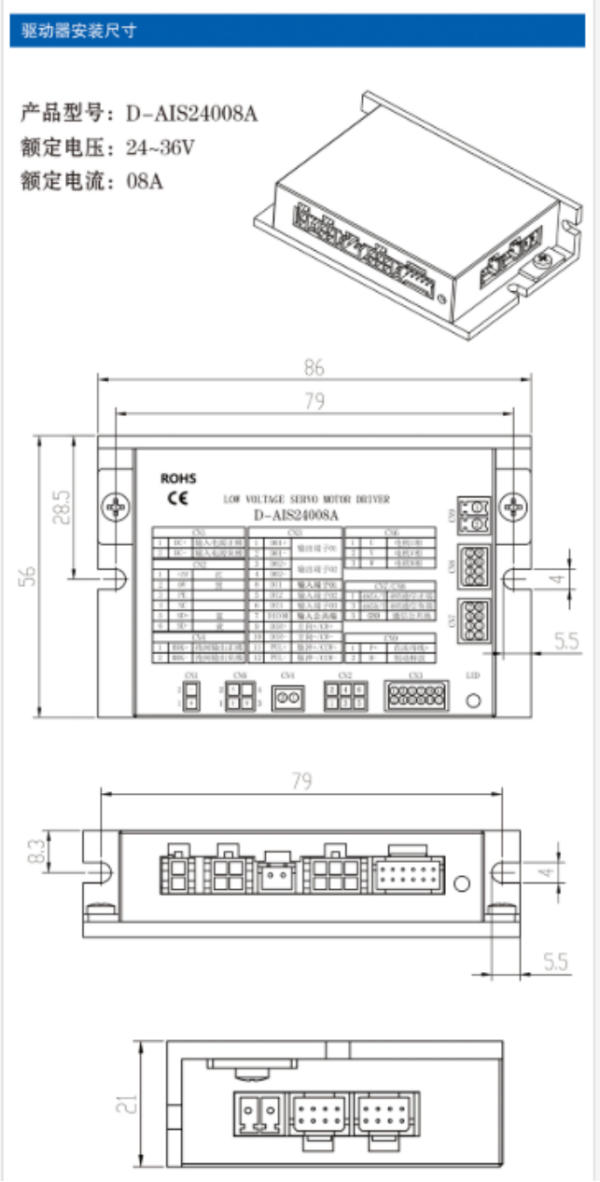
Kích thước cài đặt trình điều khiển
Mẫu sản phẩm: D – AIS24008A
Điện áp định mức: 24 – 36V
Xếp hạng hiện tại: 08MỘT
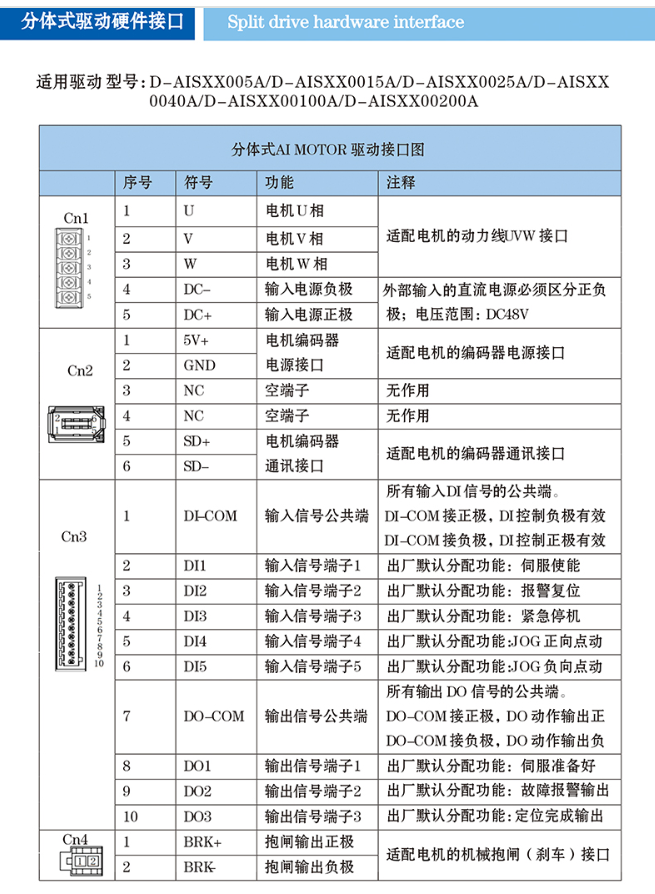
Tách ra – loại Giao diện phần cứng ổ đĩa
Các mô hình truyền động áp dụng: D – AISXX005A / D – AISXX0015A / D – AISXX0025A / D – AISXX0040A / D – AISXX00100A / D – AISXX00200A
Tách ra – Sơ đồ giao diện ổ đĩa AI MOTOR
| Số seri | Biểu tượng | Chức năng | Bình luận | |
| Cn1 | 1 | bạn | Động cơ U – giai đoạn | Cáp nguồn Giao diện JVW để điều chỉnh động cơ |
| 2 | V | Động cơ V – giai đoạn | ||
| 3 | W | Động cơ W – giai đoạn | ||
| 4 | DC – | Cực âm của nguồn điện đầu vào | Nguồn điện DC đầu vào bên ngoài phải phân biệt cực dương và cực âm; dải điện áp: DC48V | |
| 5 | DC+ | Cực dương của nguồn điện đầu vào | ||
| Cn2 | 1 | 5V+ | Giao diện nguồn bộ mã hóa động cơ | Giao diện nguồn để điều chỉnh bộ mã hóa động cơ |
| 2 | GND | Giao diện nguồn | ||
| 3 | NC | Thiết bị đầu cuối trống | Không có chức năng | |
| 4 | NC | Thiết bị đầu cuối trống | Không có chức năng | |
| 5 | SD+ | Giao diện truyền thông bộ mã hóa động cơ | Giao diện truyền thông để điều chỉnh bộ mã hóa động cơ | |
| 6 | SD – | |||
| Cn3 | 1 | TỪ – COM | Thiết bị đầu cuối chung của tín hiệu đầu vào | Thiết bị đầu cuối chung cho tất cả tín hiệu DI đầu vào. Khi DI – COM được kết nối với cực dương, kiểm soát tiêu cực của DI có hiệu quả; khi VÀO – COM được kết nối với cực âm, việc kiểm soát tích cực DI có hiệu quả |
| 2 | DI1 | Thiết bị đầu cuối tín hiệu đầu vào 1 | Nhà máy – chức năng được gán mặc định: Kích hoạt servo | |
| 3 | DI2 | Thiết bị đầu cuối tín hiệu đầu vào 2 | Nhà máy – chức năng được gán mặc định: Đặt lại báo thức | |
| 4 | DI3 | Thiết bị đầu cuối tín hiệu đầu vào 3 | Nhà máy – chức năng được gán mặc định: Dừng khẩn cấp | |
| 5 | DI4 | Thiết bị đầu cuối tín hiệu đầu vào 4 | Nhà máy – chức năng được gán mặc định: Chạy bộ tích cực JOG | |
| 6 | DI5 | Thiết bị đầu cuối tín hiệu đầu vào 5 | Nhà máy – chức năng được gán mặc định: Chạy bộ tiêu cực JOG | |
| 7 | LÀM – COM | Thiết bị đầu cuối chung của tín hiệu đầu ra | Thiết bị đầu cuối chung cho tất cả các tín hiệu DO đầu ra. Khi LÀM – COM được kết nối với cực dương, đầu ra tích cực của hành động DO có hiệu quả; khi LÀM – COM được kết nối với cực âm, đầu ra tiêu cực của hành động DO có hiệu quả | |
| 8 | DO1 | Thiết bị đầu cuối tín hiệu đầu ra 1 | Nhà máy – chức năng được gán mặc định: Sẵn sàng servo | |
| 9 | DO2 | Thiết bị đầu cuối tín hiệu đầu ra 2 | Nhà máy – chức năng được gán mặc định: Đầu ra cảnh báo lỗi | |
| 10 | DO3 | Thiết bị đầu cuối tín hiệu đầu ra 3 | Nhà máy – chức năng được gán mặc định: Đầu ra hoàn thành định vị | |
| Cn4 | 1 | BRK+ | Cực dương của đầu ra phanh | Giao diện điều chỉnh phanh cơ khí (phanh) của động cơ |
| 2 | BRK – | Cực âm của đầu ra phanh |
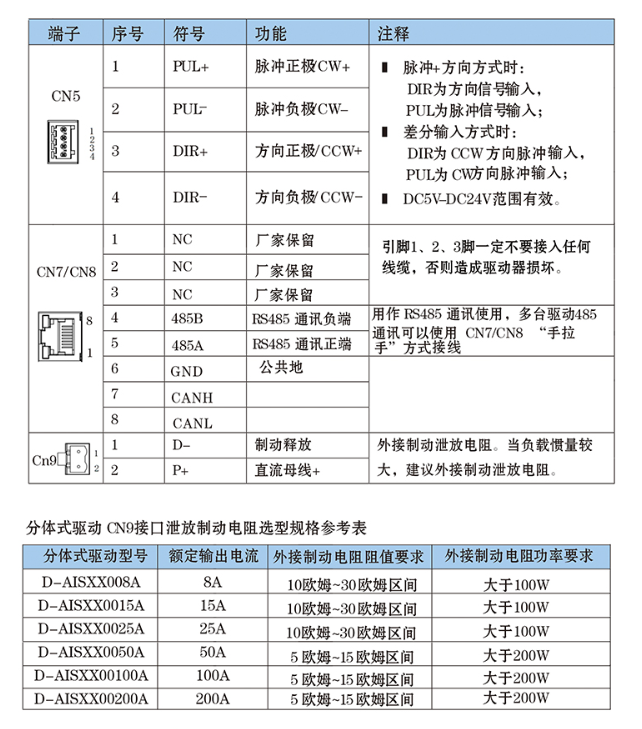
| Phần cuối | Số seri | Biểu tượng | Chức năng | Bình luận |
| CN5 | 1 | PUL+ | Cực dương của xung (CW+) | Khi có xung + chế độ hướng: DIR là đầu vào tín hiệu hướng, và PUL là đầu vào tín hiệu xung; khi ở chế độ đầu vào vi sai: DIR là đầu vào xung hướng CCW, và PUL là đầu vào xung hướng CW; hiệu quả trong DC5V – Phạm vi DC24V |
| 2 | PUL – | Cực âm của xung (CW – ) | ||
| 3 | TRỰC TIẾP+ | Cực định hướng dương (CCW+) | ||
| 4 | TRỰC TIẾP – | Cực âm của hướng (CCW – ) | ||
| CN7/CN8 | 1 | NC | Được nhà sản xuất bảo lưu | Ghim 1, 2, Và 3 không được kết nối với bất kỳ dây nào, nếu không thì trình điều khiển sẽ bị hư hỏng |
| 2 | NC | Được nhà sản xuất bảo lưu | ||
| 3 | NC | Được nhà sản xuất bảo lưu | ||
| 4 | 485B | Cực âm của truyền thông RS485 | Được sử dụng cho giao tiếp RS485. Nhiều ổ đĩa có thể được nối dây trong một “hoa cúc – xích” cách sử dụng CN7/CN8 cho giao tiếp RS485 | |
| 5 | 485MỘT | Cực dương của truyền thông RS485 | ||
| 6 | GND | Điểm chung | ||
| 7 | CANH | |||
| 8 | SỐNG | |||
| Cn9 | 1 | D – | Nhả phanh | Kết nối điện trở xả phanh bên ngoài. Khi quán tính của tải lớn, nên kết nối một điện trở xả phanh bên ngoài |
| 2 | P+ | xe buýt DC + |
Lựa chọn bảng tham khảo thông số kỹ thuật để xả điện trở hãm của bộ chia – loại Giao diện Drive Cn9
| Tách ra – loại mô hình ổ đĩa | Dòng điện đầu ra định mức | Yêu cầu về giá trị điện trở của điện trở hãm ngoài | Yêu cầu về công suất của điện trở hãm ngoài |
| D – AISXX008A | 8MỘT | 10 ôm – 30 phạm vi ohm | Lớn hơn 100W |
| D – AISXX0015A | 15MỘT | 10 ôm – 30 phạm vi ohm | Lớn hơn 100W |
| D – AISXX0025A | 25MỘT | 10 ôm – 30 phạm vi ohm | Lớn hơn 100W |
| D – AISXX0050A | 50MỘT | 5 ôm – 15 phạm vi ohm | Lớn hơn 200W |
| D – AISXX00100A | 100MỘT | 5 ôm – 15 phạm vi ohm | Lớn hơn 200W |
| D – AISXX00200A | 200MỘT | 5 ôm – 15 phạm vi ohm | Lớn hơn 200W |
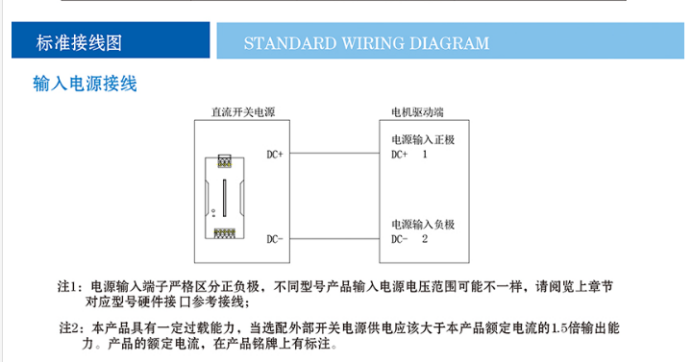
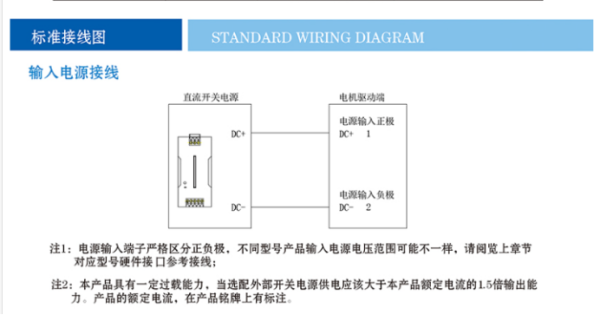
Sơ đồ nối dây tiêu chuẩn
Dây cấp nguồn đầu vào
Ghi chú 1: Các thiết bị đầu cuối nguồn điện đầu vào phải phân biệt nghiêm ngặt các cực dương và cực âm. Dải điện áp nguồn đầu vào có thể khác nhau đối với các kiểu máy khác nhau. Vui lòng tham khảo hệ thống dây tham chiếu giao diện phần cứng cho model tương ứng ở chương trước.
Ghi chú 2: Sản phẩm này có khả năng quá tải nhất định. Khi chọn nguồn điện chuyển mạch bên ngoài, công suất đầu ra phải là 1.5 lần dòng điện định mức của sản phẩm này. Dòng điện định mức của sản phẩm được ghi trên bảng tên.
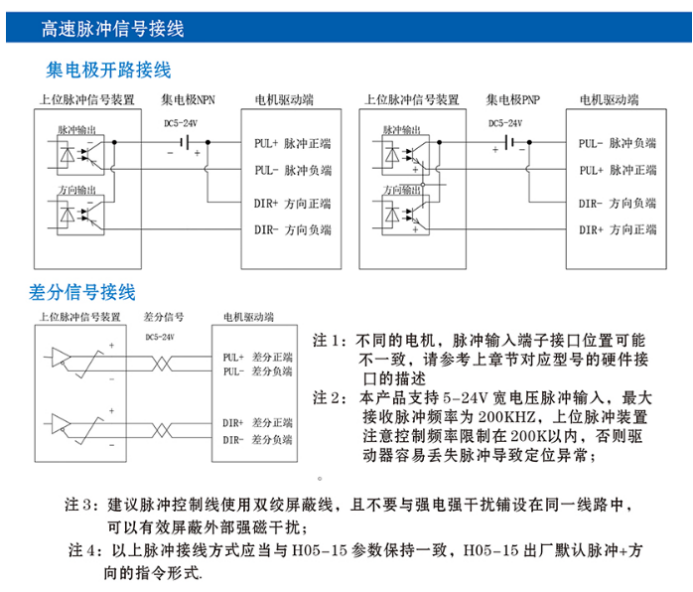
Cao – dây tín hiệu xung tốc độ
Người sưu tầm – Mở dây
Dây tín hiệu vi sai
Ghi chú 1: Đối với các động cơ khác nhau, vị trí giao diện của các đầu vào xung có thể thay đổi. Vui lòng tham khảo mô tả giao diện phần cứng của model tương ứng ở chương trước.
Ghi chú 2: Sản phẩm này hỗ trợ đầu vào xung với dải điện áp rộng từ 5 – 24V, và tần số xung nhận được tối đa là 200KHZ. Phần trên – Thiết bị xung mức cần chú ý giới hạn tần số trong khoảng 200K để tránh trường hợp người lái dễ bị mất xung và gây bất thường về định vị.
Ghi chú 3: Nên sử dụng gấp đôi – dây được che chắn cho các đường dây điều khiển xung và tránh đặt chúng trong cùng một mạch điện mạnh – nguồn nhiễu hiện tại, có thể che chắn hiệu quả sự can thiệp từ trường mạnh bên ngoài.
Ghi chú 4: Các phương pháp kết nối xung trên phải phù hợp với H05 – 15 thông số. Mặc định của nhà máy cho H05 – 15 là xung + chế độ lệnh hướng.
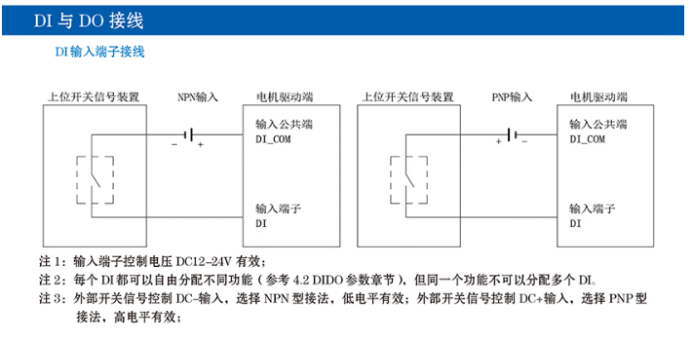
Dây DI và DO
Dây đầu cuối đầu vào AT
Ghi chú 1: Điện áp điều khiển của các cực đầu vào có hiệu lực ở DC12 – 24V.
Ghi chú 2: Mỗi DI có thể được tự do gán các chức năng khác nhau (tham khảo 4.2 Phần tham số DIDO), nhưng không thể gán cùng một chức năng cho nhiều DI.
Ghi chú 3: Để điều khiển tín hiệu chuyển đổi bên ngoài với DC – đầu vào, chọn NPN – loại phương thức kết nối, nơi nào thấp – mức độ có hiệu lực; để điều khiển tín hiệu chuyển đổi bên ngoài với đầu vào DC+, chọn PNP – loại phương thức kết nối, cao ở đâu – mức độ có hiệu lực.
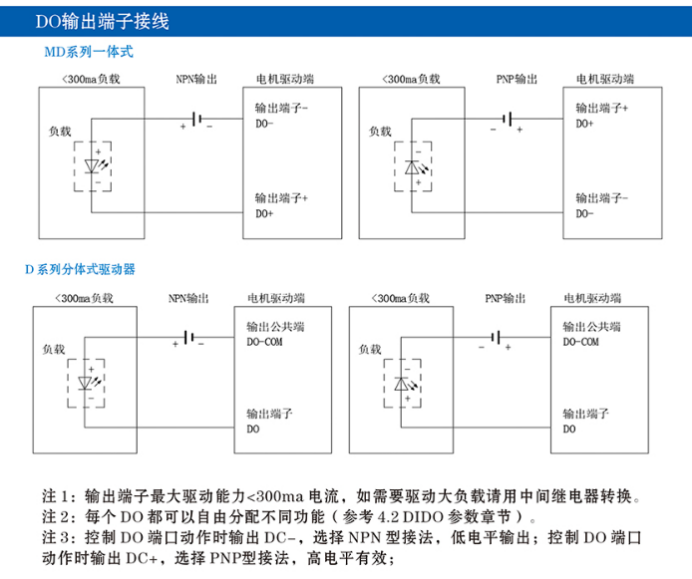
Dây đầu ra DO
Ghi chú 1: Công suất truyền động tối đa của các thiết bị đầu cuối đầu ra là <300ma hiện tại. Nếu cần phải lái một tải lớn, nên sử dụng rơle để chuyển đổi.
Ghi chú 2: Mỗi DO có thể được tự do gán các chức năng khác nhau (tham khảo 4.2 Phần tham số DIDO).
Ghi chú 3: Khi điều khiển hoạt động của cổng DO, nếu DC – là đầu ra, chọn NPN – loại phương thức kết nối, nơi nào thấp – mức sản lượng có hiệu quả; nếu DC+ là đầu ra, chọn PNP – loại phương thức kết nối, cao ở đâu – mức sản lượng có hiệu quả.
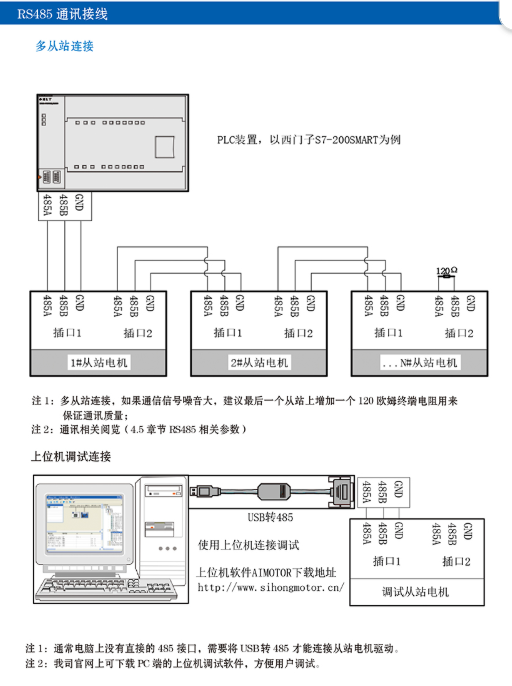
Dây truyền thông RS485
đa – Kết nối nô lệ
Ghi chú 1: Đối với nhiều – kết nối nô lệ, nếu nhiễu tín hiệu liên lạc lớn, nên thêm một 120 – điện trở đầu cuối ohm đến nô lệ cuối cùng để đảm bảo chất lượng truyền thông.
Ghi chú 2: Để liên lạc – nội dung liên quan, tham khảo (phần 4.5 RS485 – thông số liên quan).
Kết nối gỡ lỗi máy chủ
Ghi chú 1: Thường xuyên, một máy tính không có kết nối trực tiếp 485 giao diện, và một chiếc USB – ĐẾN – 485 cần có bộ chuyển đổi để kết nối với ổ đĩa động cơ phụ.
Ghi chú 2: Có thể tải xuống phần mềm gỡ lỗi máy chủ cho PC từ trang web chính thức của công ty chúng tôi, thuận tiện cho người dùng gỡ lỗi.