
D – AIS48100A Basso – driver del servomotore intelligente di tensione


$0.00
Parametri tecnici
- Descrizione
Descrizione

D – AIS48100A Basso – driver del servomotore intelligente di tensione
Dettagli del prodotto
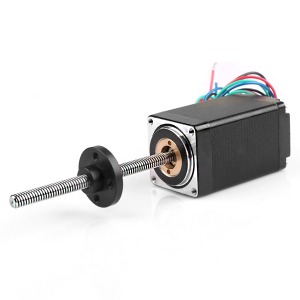
Presenta una forte stabilità, alto – posizionamento di precisione, elevata risposta motoria, basso rumore, bassa generazione di calore, Bene – progettazione strutturata, forte capacità di sovraccarico, funzioni pratiche e ricche, e un'applicazione semplice e conveniente. Ha protezioni contro l'over – voltaggio, Sotto – voltaggio, velocità eccessiva, Sopra – attuale, sovraccarico, anomalie dell'encoder, deviazione di posizione, stallo, anomalie dei parametri, ecc.
Specifiche tecniche
| Modello di guida | Intervallo di tensione (V) | Corrente nominale (UN) |
| D – AIS24008A | 24 – 36 | 8 |
| D – AIS48015A | 24 – 48 | 15 |
| D – AIS48025A | 24 – 60 | 25 |
| D – AIS48050A | 24 – 72 | 50 |
| D – AIS48100A | 36 – 72 | 100 |
| D – AIS72200A | 48 – 96 | 200 |
| D – AIS72300A | 48 – 96 | 300 |
| Metodo di controllo | ① Controllo della posizione ② Controllo della velocità ③ Controllo della coppia ④ Controllo della comunicazione |
| Caratteristiche di controllo | Risposta in frequenza di velocità: ≥200Hz, Frequenza degli impulsi ricevuti ≤200kHz, Tasso di fluttuazione della velocità: < ±0,03 (Carico 0 – 100%): < ±0,02×(0.9 – 1.1) Tensione di alimentazione |
| Funzione di monitoraggio | Velocità attuale, DI Input, Uscita DO, Posizione attuale, Accumulo di impulsi in ingresso di comando, Tasso di carico medio, Conteggio deviazione posizione, Corrente di fase del motore, Valore della tensione del bus, Temperatura del modulo, Registrazione degli allarmi, Velocità corrispondente alla frequenza degli impulsi di comando, Stato operativo, ecc. |
| Casa – funzione di ritorno | 13 Tipi di autonomia (Ricerca) Casa – modalità di ritorno, e Casa – funzione di spostamento del punto |
| Funzione RS485 | Segue Modbus standard – Protocollo Rtu, Uno – A – Due Due – Way Interfaccia di comunicazione per una facile rete e connessione parallela |
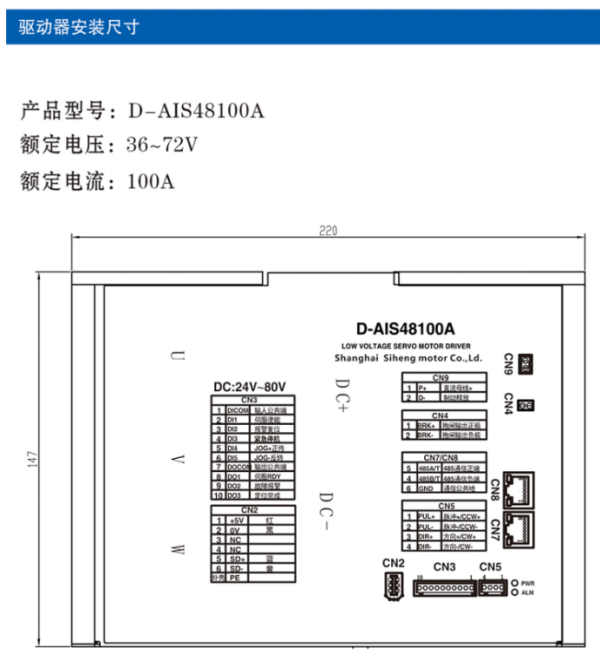
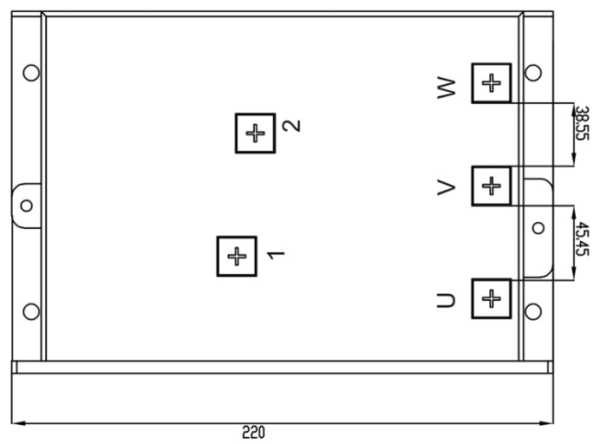
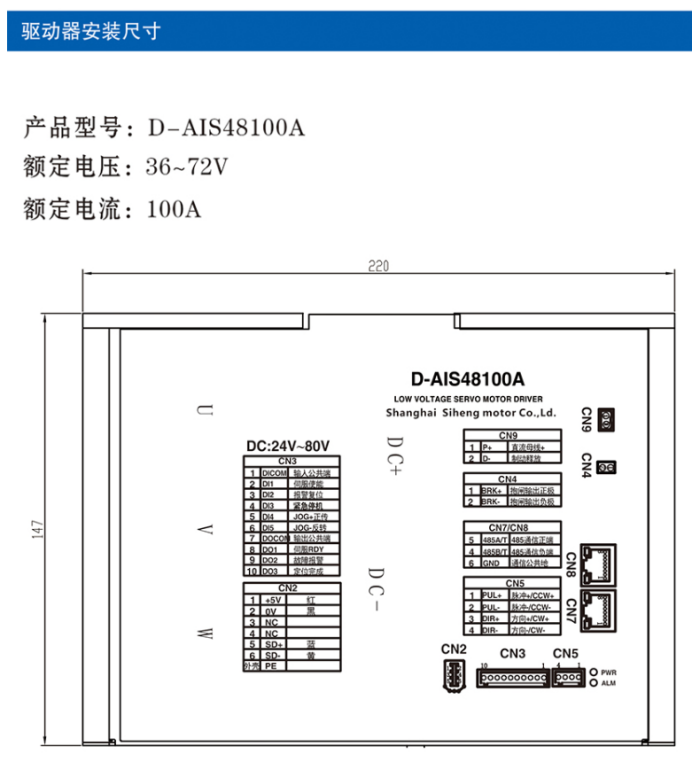
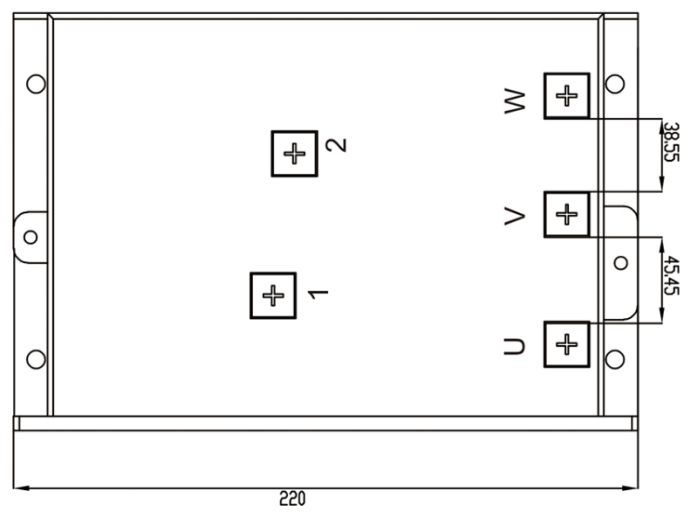
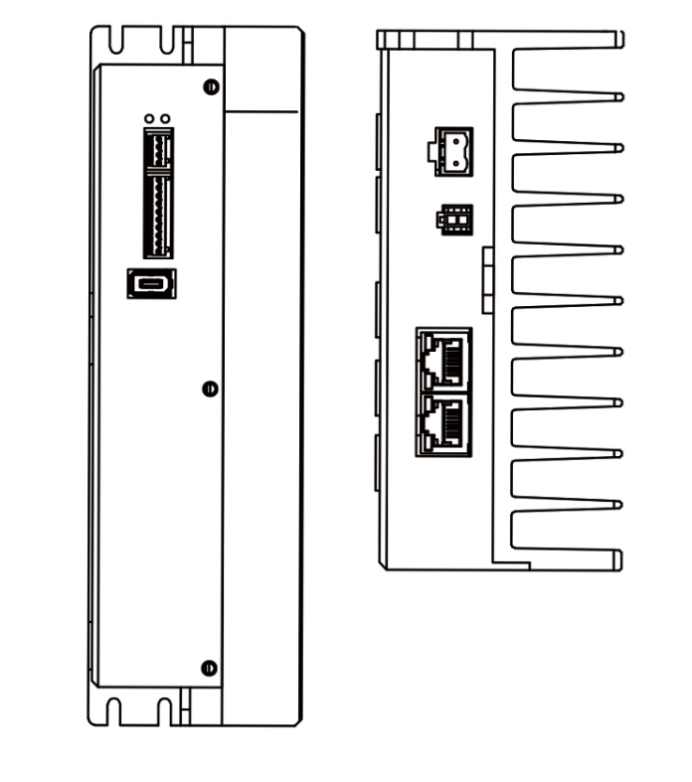
Dimensioni di installazione del driver
Modello del prodotto: D – AIS48100A
Tensione nominale: 36 – 72V
Corrente nominale: 100UN
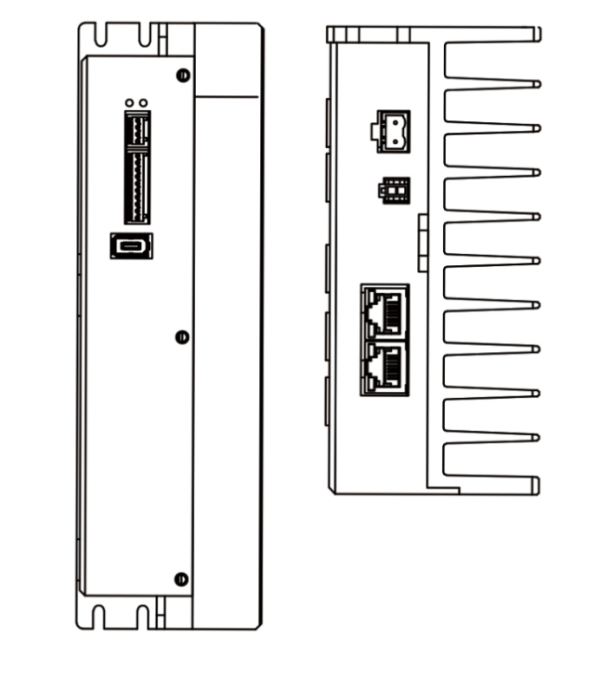
Diviso – tipo Interfaccia hardware dell'azionamento
Modelli di azionamento applicabili: D – AISXX005A / D – AISXX0015A / D – AISXX0025A / D – AISXX0040A / D – AISXX00100A / D – AISXX00200A
Diviso – tipo AI MOTOR Schema dell'interfaccia dell'azionamento
| Numero di serie | Simbolo | Funzione | Osservazioni | |
| Cn1 | 1 | U | Motore U – fase | Cavo di alimentazione Interfaccia JVW per l'adattamento del motore |
| 2 | V | Motore V – fase | ||
| 3 | W | Motore W – fase | ||
| 4 | DC – | Polo negativo dell'alimentazione in ingresso | L'alimentatore CC in ingresso esterno deve distinguere i poli positivo e negativo; intervallo di tensione: DC48V | |
| 5 | CC+ | Polo positivo dell'alimentazione in ingresso | ||
| Cn2 | 1 | 5V+ | Interfaccia di potenza dell'encoder del motore | Interfaccia di potenza per l'adattamento dell'encoder del motore |
| 2 | GND | Interfaccia di potenza | ||
| 3 | NC | Terminale vuoto | Nessuna funzione | |
| 4 | NC | Terminale vuoto | Nessuna funzione | |
| 5 | SD+ | Interfaccia di comunicazione dell'encoder del motore | Interfaccia di comunicazione per l'adattamento dell'encoder motore | |
| 6 | SD – | |||
| Cn3 | 1 | DI – COM | Terminale comune dei segnali di ingresso | Terminale comune per tutti i segnali DI in ingresso. Quando DI – COM è collegato al polo positivo, il controllo negativo del DI è efficace; quando IN – COM è collegato al polo negativo, il controllo positivo del DI è efficace |
| 2 | Di1 | Terminale del segnale di ingresso 1 | Fabbrica – funzione assegnata predefinita: Abilitazione servo | |
| 3 | DI2 | Terminale del segnale di ingresso 2 | Fabbrica – funzione assegnata predefinita: Reset allarme | |
| 4 | DI3 | Terminale del segnale di ingresso 3 | Fabbrica – funzione assegnata predefinita: Arresto di emergenza | |
| 5 | DI4 | Terminale del segnale di ingresso 4 | Fabbrica – funzione assegnata predefinita: JOG jog positivo | |
| 6 | DI5 | Terminale del segnale di ingresso 5 | Fabbrica – funzione assegnata predefinita: JOG Jog negativo | |
| 7 | FARE – COM | Terminale comune dei segnali di uscita | Terminale comune per tutti i segnali DO in uscita. Quando FARE – COM è collegato al polo positivo, l'esito positivo dell'azione DO è efficace; quando FARE – COM è collegato al polo negativo, l'output negativo dell'azione DO è efficace | |
| 8 | DO1 | Terminale del segnale di uscita 1 | Fabbrica – funzione assegnata predefinita: Servo pronto | |
| 9 | DO2 | Terminale del segnale di uscita 2 | Fabbrica – funzione assegnata predefinita: Uscita allarme guasto | |
| 10 | DO3 | Terminale del segnale di uscita 3 | Fabbrica – funzione assegnata predefinita: Output del completamento del posizionamento | |
| Cn4 | 1 | BRK+ | Polo positivo dell'uscita freno | Interfaccia per l'adattamento del freno meccanico (freno) del motore |
| 2 | BRK – | Polo negativo dell'uscita freno |
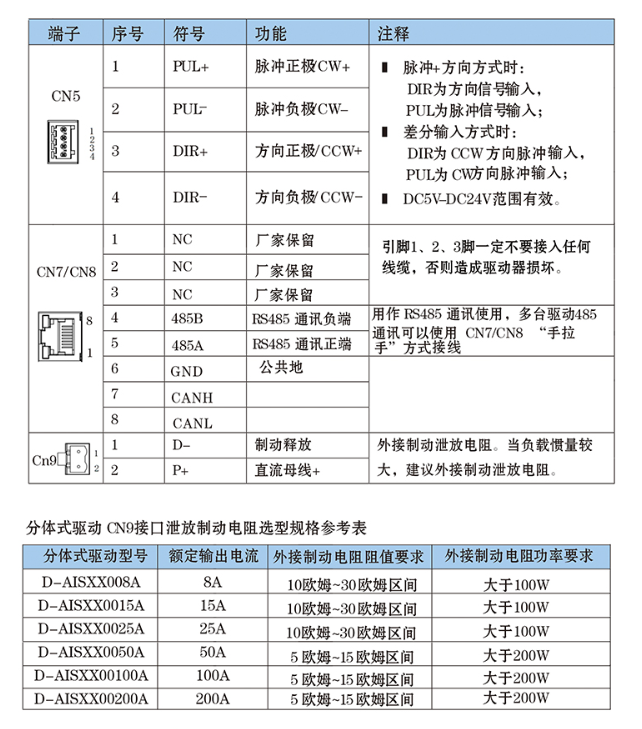
| terminale | Numero di serie | Simbolo | Funzione | Osservazioni |
| CN5 | 1 | PUL+ | Polo positivo dell'impulso (CW+) | Quando è in pulsazione + modalità di direzione: DIR è l'ingresso del segnale di direzione, e PUL è l'ingresso del segnale a impulsi; quando è in modalità ingresso differenziale: DIR è l'ingresso dell'impulso di direzione CCW, e PUL è l'ingresso dell'impulso di direzione CW; efficace all'interno del DC5V – Gamma DC24V |
| 2 | PUL – | Polo negativo dell'impulso (CW – ) | ||
| 3 | DIR+ | Polo positivo della direzione (Antiorario+) | ||
| 4 | DIR – | Polo negativo della direzione (CCW – ) | ||
| CN7/CN8 | 1 | NC | Riservato dal produttore | Perni 1, 2, E 3 non deve essere collegato a nessun filo, altrimenti il conducente verrà danneggiato |
| 2 | NC | Riservato dal produttore | ||
| 3 | NC | Riservato dal produttore | ||
| 4 | 485B | Terminale negativo della comunicazione RS485 | Utilizzato per la comunicazione RS485. È possibile collegare più unità in un “margherita – catena” modo utilizzando CN7/CN8 per la comunicazione RS485 | |
| 5 | 485UN | Terminale positivo della comunicazione RS485 | ||
| 6 | GND | Terreno comune | ||
| 7 | MINESTRA | |||
| 8 | VIVERE | |||
| Cn9 | 1 | D – | Rilascio del freno | Collegare un resistore di scarica di frenatura esterno. Quando l'inerzia del carico è elevata, si consiglia di collegare una resistenza di scarica di frenatura esterna |
| 2 | P+ | Bus CC + |
Tabella di riferimento delle specifiche di selezione per la scarica della resistenza di frenatura dello split – tipo Interfaccia Drive Cn9
| Diviso – tipo Modello di azionamento | Corrente di uscita nominale | Requisiti per il valore di resistenza del resistore di frenatura esterno | Requisiti per l'alimentazione della resistenza di frenatura esterna |
| D – AISXX008A | 8UN | 10 ohm – 30 gamma ohm | Maggiore di 100 W |
| D – AISXX0015A | 15UN | 10 ohm – 30 gamma ohm | Maggiore di 100 W |
| D – AISXX0025A | 25UN | 10 ohm – 30 gamma ohm | Maggiore di 100 W |
| D – AISXX0050A | 50UN | 5 ohm – 15 gamma ohm | Maggiore di 200 W |
| D – AISXX00100A | 100UN | 5 ohm – 15 gamma ohm | Maggiore di 200 W |
| D – AISXX00200A | 200UN | 5 ohm – 15 gamma ohm | Maggiore di 200 W |
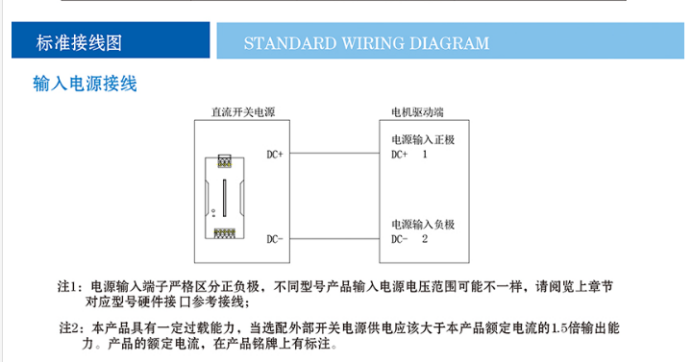
Schema elettrico standard
Cablaggio dell'alimentazione in ingresso
Nota 1: I terminali dell'alimentazione in ingresso devono distinguere rigorosamente i poli positivo e negativo. L'intervallo della tensione di alimentazione in ingresso può variare a seconda dei modelli. Fare riferimento al cablaggio di riferimento dell'interfaccia hardware per il modello corrispondente nel capitolo precedente.
Nota 2: Questo prodotto ha una certa capacità di sovraccarico. Quando si seleziona un alimentatore switching esterno, la capacità di uscita dovrebbe essere 1.5 volte la corrente nominale di questo prodotto. La corrente nominale del prodotto è indicata sulla targhetta.
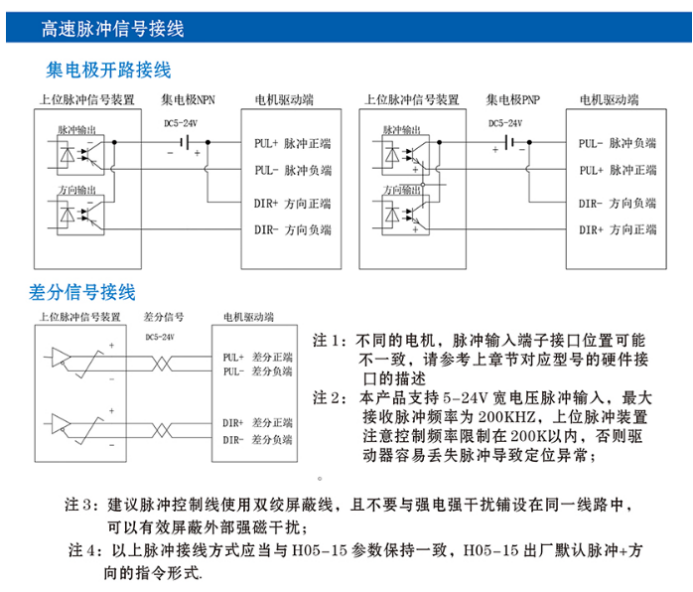
Alto – Cablaggio del segnale dell'impulso di velocità
Collettore – Cablaggio aperto
Cablaggio del segnale differenziale
Nota 1: Per motori diversi, le posizioni dell'interfaccia dei terminali di ingresso a impulsi possono variare. Fare riferimento alla descrizione dell'interfaccia hardware del modello corrispondente nel capitolo precedente.
Nota 2: Questo prodotto supporta l'ingresso a impulsi con un'ampia gamma di tensioni 5 – 24V, e la frequenza massima degli impulsi ricevuti è 200 KHZ. La parte superiore – il dispositivo a impulsi di livello deve prestare attenzione a limitare la frequenza entro 200K per evitare che il conducente perda facilmente gli impulsi e causi anomalie di posizionamento.
Nota 3: Si consiglia di utilizzare il doppio – cavi schermati per le linee di controllo degli impulsi ed evitare di inserirli nello stesso circuito di quelli forti – fonti di interferenza attuali, che può proteggere efficacemente forti interferenze magnetiche esterne.
Nota 4: I metodi di connessione a impulsi di cui sopra dovrebbero essere coerenti con H05 – 15 parametri. L'impostazione predefinita di fabbrica per H05 – 15 è impulso + modalità di comando di direzione.
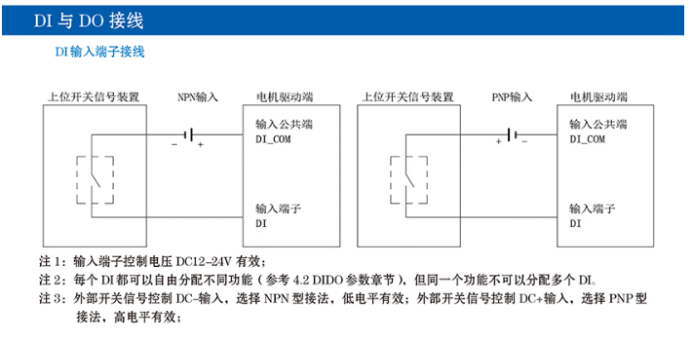
Cablaggio DI e DO
Cablaggio del terminale di ingresso AT
Nota 1: La tensione di controllo dei terminali di ingresso è valida su DC12 – 24V.
Nota 2: Ad ogni DI possono essere liberamente assegnate diverse funzioni (fare riferimento al 4.2 Sezione parametri DIDO), ma la stessa funzione non può essere assegnata a più DI.
Nota 3: Per il controllo del segnale di commutazione esterno con DC – ingresso, selezionare la NPN – tipo di metodo di connessione, dove basso – il livello è efficace; per il controllo del segnale di commutazione esterno con ingresso DC+, selezionare il PNP – tipo di metodo di connessione, dove alto – il livello è efficace.
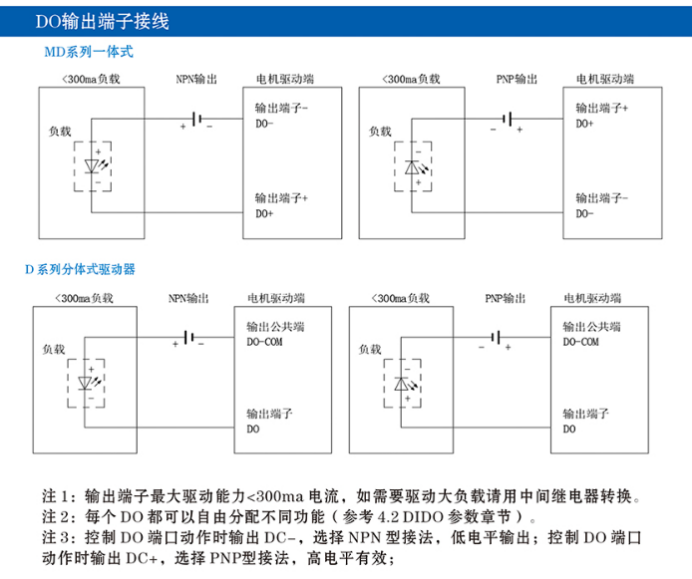
Cablaggio del terminale di uscita DO
Nota 1: La capacità di guida massima dei terminali di uscita è <300ma corrente. Se è necessario trasportare un carico di grandi dimensioni, per la conversione dovrebbe essere utilizzato un relè.
Nota 2: Ad ogni DO possono essere liberamente assegnate diverse funzioni (fare riferimento al 4.2 Sezione parametri DIDO).
Nota 3: Quando si controlla l'azione della porta DO, se DC – viene emesso, selezionare la NPN – tipo di metodo di connessione, dove basso – il livello di uscita è efficace; se viene emesso DC+, selezionare il PNP – tipo di metodo di connessione, dove alto – il livello di uscita è efficace.
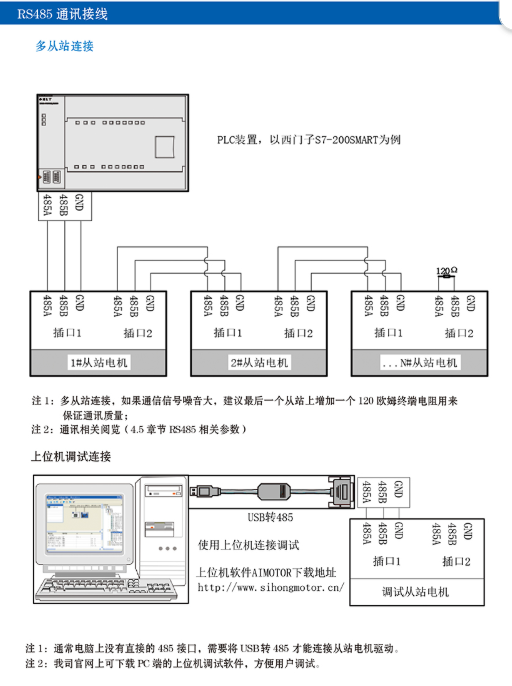
Cablaggio di comunicazione RS485
Multiplo – Connessione schiava
Nota 1: Per multi – collegamento schiavo, se il rumore del segnale di comunicazione è elevato, si consiglia di aggiungere a 120 – resistenza terminale ohm all'ultimo slave per garantire la qualità della comunicazione.
Nota 2: Per la comunicazione – contenuto correlato, fare riferimento a (sezione 4.5 RS485 – parametri correlati).
Connessione di debug del computer host
Nota 1: Generalmente, un computer non ha un collegamento diretto 485 interfaccia, e una USB – A – 485 è necessario un convertitore per collegarsi all'azionamento del motore slave.
Nota 2: Il software di debug del computer host per PC può essere scaricato dal sito Web ufficiale della nostra azienda, che è conveniente per gli utenti eseguire il debug.