
d – AIS72200A 低 – 電圧 インテリジェント サーボ モーター ドライバー


$0.00
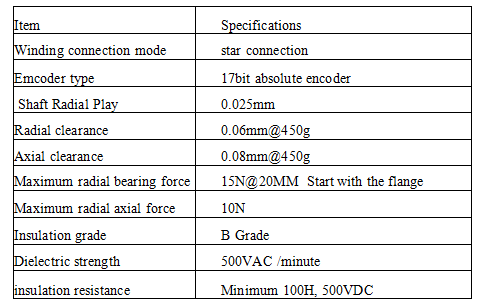
技術的パラメータ
- 形容
形容
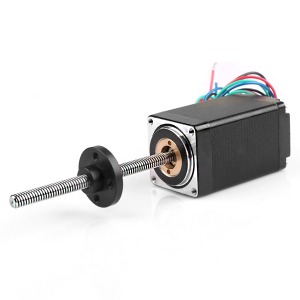
d – AIS72200A 低 – 電圧 インテリジェント サーボ モーター ドライバー
製品詳細
強い安定性が特徴です, 高い – 精密な位置決め, 高いモーター応答性, 低騒音, 低発熱, 大丈夫 – 構造化されたデザイン, 強力な過負荷容量, 実用的で豊富な機能, シンプルで便利なアプリケーション. オーバーに対する保護機能があります – 電圧, 下 – 電圧, スピード超過, 以上 – 現在, 過負荷, エンコーダの異常, 位置偏差, ストール, パラメータ異常, 等.
技術仕様
| ドライブモデル | 電圧範囲 (v) | 定格電流 (あ) |
| d – AIS24008A | 24 – 36 | 8 |
| d – AIS48015A | 24 – 48 | 15 |
| d – AIS48025A | 24 – 60 | 25 |
| d – AIS48050A | 24 – 72 | 50 |
| d – AIS48100A | 36 – 72 | 100 |
| d – AIS72200A | 48 – 96 | 200 |
| d – AIS72300A | 48 – 96 | 300 |
| 制御方法 | ①位置制御 ②速度制御 ③トルク制御 ④通信制御 |
| 制御特性 | 速度 周波数応答: ≧200Hz, 受信パルス周波数≤200kHz, 速度変動率: < ±0.03 (負荷 0 – 100%): < ±0.02×(0.9 – 1.1) 電源電圧 |
| 監視機能 | 現在の速度, DI入力, DO出力, 現在の位置, 指令入力パルス積算, 平均負荷率, 位置ずれ数, モーター相電流, バス電圧値, モジュール温度, アラーム記録, 指令パルス周波数対応速度, 稼働状況, 等. |
| 家 – 戻り関数 | 13 自律型の種類 (検索) 家 – モードを返す, そしてホーム – ポイントオフセット機能 |
| RS485機能 | 標準 Modbus に準拠 – RTUプロトコル, 1つ – に – ツーツー – 簡単なネットワーキングと並列接続のための通信インターフェース |
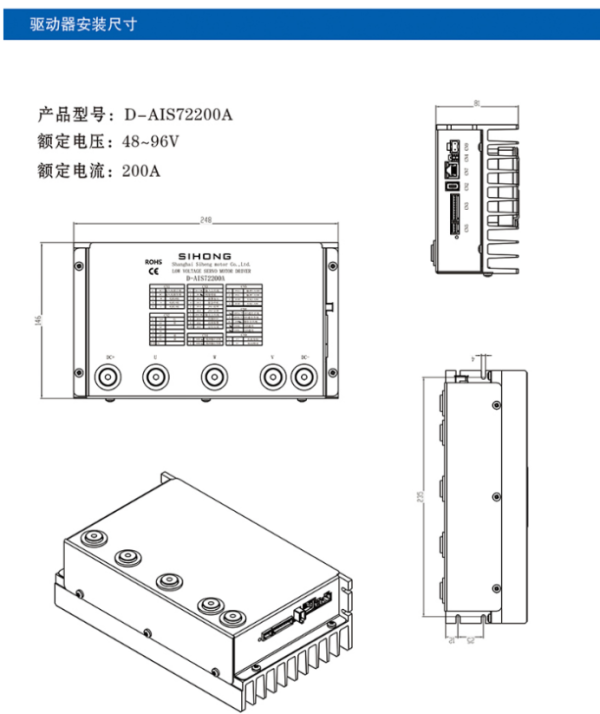
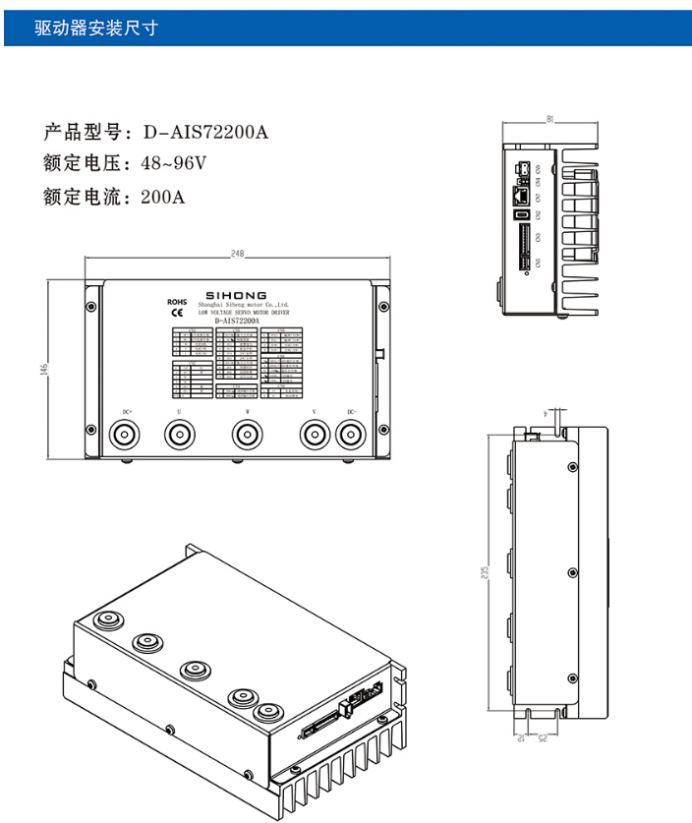
ドライバ取り付け寸法
製品型式: d – AIS72200A
定格電圧: 48 – 96v
定格電流: 200あ
スプリット – タイプ ドライブ ハードウェア インターフェイス
適用ドライブ型式: d – AISXX005A / d – AISXX0015A / d – AISXX0025A / d – AISXX0040A / d – AISXX00100A / d – AISXX00200A
スプリット – type AI MOTOR ドライブインターフェース図
| シリアルナンバー | シンボル | 関数 | 備考 | |
| Cn1 | 1 | U | モーターU – 段階 | モーターを適合させるための電源ケーブル JVW インターフェース |
| 2 | v | エンジンV – 段階 | ||
| 3 | W | モーターW – 段階 | ||
| 4 | 直流 – | 入力電源のマイナス極 | 外部入力 DC 電源は正極と負極を区別する必要があります; 電圧範囲: DC48V | |
| 5 | DC+ | 入力電源の正極 | ||
| Cn2 | 1 | 5V+ | モーター・エンコーダー電源インターフェース | モーターエンコーダーを適応させるための電源インターフェース |
| 2 | GND | 電源インターフェース | ||
| 3 | ノースカロライナ州 | 空のターミナル | 機能なし | |
| 4 | ノースカロライナ州 | 空のターミナル | 機能なし | |
| 5 | SD+ | モーター・エンコーダー通信インターフェース | モーターエンコーダーを適応させるための通信インターフェース | |
| 6 | SD – | |||
| Cn3 | 1 | から – COM | 入力信号のコモン端子 | 全入力DI信号のコモン端子. DIの場合 – COMは正極に接続されています, DIのネガティブコントロールが有効; INのとき – COMはマイナス極に接続されています, DIのポジティブコントロールが有効 |
| 2 | Di1 | 入力信号端子 1 | 工場 – デフォルトで割り当てられた機能: サーボイネーブル | |
| 3 | DI2 | 入力信号端子 2 | 工場 – デフォルトで割り当てられた機能: アラームリセット | |
| 4 | DI3 | 入力信号端子 3 | 工場 – デフォルトで割り当てられた機能: 非常停止 | |
| 5 | DI4 | 入力信号端子 4 | 工場 – デフォルトで割り当てられた機能: JOG ポジティブジョグ | |
| 6 | DI5 | 入力信号端子 5 | 工場 – デフォルトで割り当てられた機能: JOG ネガティブジョグ | |
| 7 | する – COM | 出力信号のコモン端子 | 全出力DO信号のコモン端子. いつ行うか – COMは正極に接続されています, DOアクションのプラス出力が有効; いつ行うか – COMはマイナス極に接続されています, DOアクションのマイナス出力が有効です | |
| 8 | DO1 | 出力信号端子 1 | 工場 – デフォルトで割り当てられた機能: サーボ準備完了 | |
| 9 | DO2 | 出力信号端子 2 | 工場 – デフォルトで割り当てられた機能: 故障警報出力 | |
| 10 | DO3 | 出力信号端子 3 | 工場 – デフォルトで割り当てられた機能: 位置決め完了出力 | |
| Cn4 | 1 | BRK+ | ブレーキ出力の正極 | メカニカルブレーキを適応させるためのインターフェース (ブレーキ) モーターの |
| 2 | BRK – | ブレーキ出力のマイナス極 |
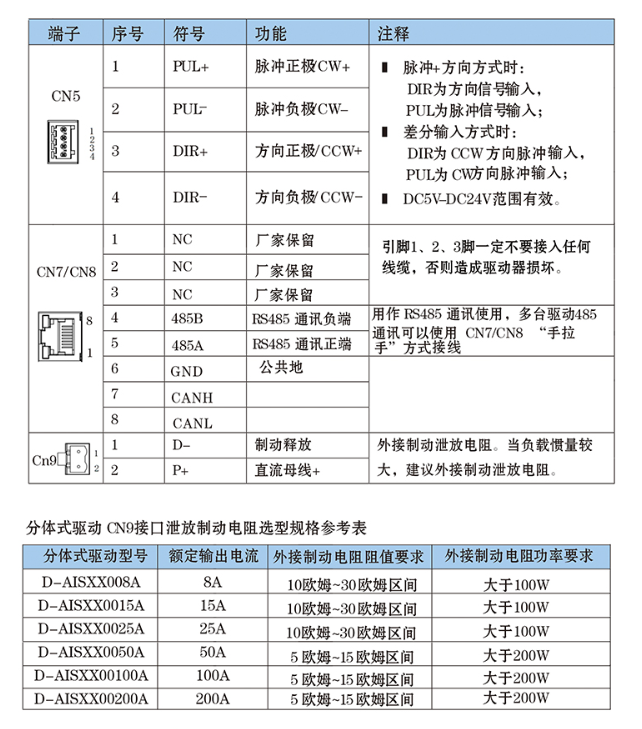
| ターミナル | シリアルナンバー | シンボル | 関数 | 備考 |
| CN5 | 1 | プルプラス | パルスの正極 (CW+) | 脈拍のとき + 方向モード: DIR は方向信号入力です, PUL はパルス信号入力です; 差動入力モード時: DIRはCCW方向パルス入力です。, PUL は CW 方向のパルス入力です。; DC5V以内で有効 – DC24Vレンジ |
| 2 | プル – | パルスの負極 (CW – ) | ||
| 3 | ディレクトリ+ | 方向の正の極 (反時計回り+) | ||
| 4 | ディレクトリ – | 方向の負極 (反時計回り – ) | ||
| CN7/CN8 | 1 | ノースカロライナ州 | メーカー予約品 | ピン 1, 2, そして 3 ワイヤーに接続しないでください, そうしないとドライバーが破損します |
| 2 | ノースカロライナ州 | メーカー予約品 | ||
| 3 | ノースカロライナ州 | メーカー予約品 | ||
| 4 | 485B | RS485通信のマイナス端子 | RS485通信に使用. 複数のドライブを1台で配線可能 “デイジー – 鎖” RS485通信にCN7/CN8を使用する方式 | |
| 5 | 485あ | RS485通信のプラス端子 | ||
| 6 | GND | 共通点 | ||
| 7 | スープ | |||
| 8 | ライブ | |||
| Cn9 | 1 | d – | ブレーキ解除 | 外部制動放電抵抗器を接続します. 負荷イナーシャが大きい場合, 外部制動放電抵抗器を接続することをお勧めします |
| 2 | P+ | DCバス + |
分割放電制動抵抗器選定仕様対照表 – タイプ ドライブ Cn9 インターフェース
| スプリット – タイプ ドライブモデル | 定格出力電流 | 外部制動抵抗器の抵抗値の要件 | 外部制動抵抗器の電力要件 |
| d – AISXX008A | 8あ | 10 オーム – 30 オーム範囲 | 100W以上 |
| d – AISXX0015A | 15あ | 10 オーム – 30 オーム範囲 | 100W以上 |
| d – AISXX0025A | 25あ | 10 オーム – 30 オーム範囲 | 100W以上 |
| d – AISXX0050A | 50あ | 5 オーム – 15 オーム範囲 | 200W以上 |
| d – AISXX00100A | 100あ | 5 オーム – 15 オーム範囲 | 200W以上 |
| d – AISXX00200A | 200あ | 5 オーム – 15 オーム範囲 | 200W以上 |
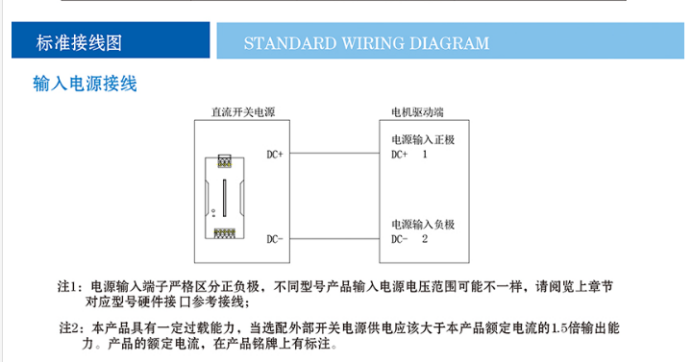
標準配線図
入力電源の配線
注記 1: 入力電源端子は正極と負極を厳密に区別する必要があります. 入力電源電圧範囲はモデルによって異なる場合があります. 前章の対応モデルのハードウェア インターフェイスのリファレンス配線を参照してください。.
注記 2: この製品には一定の過負荷容量があります. 外部スイッチング電源を選択する場合, 出力容量は次のとおりです 1.5 本製品の定格電流の2倍. 製品の定格電流は銘板に記載されています.
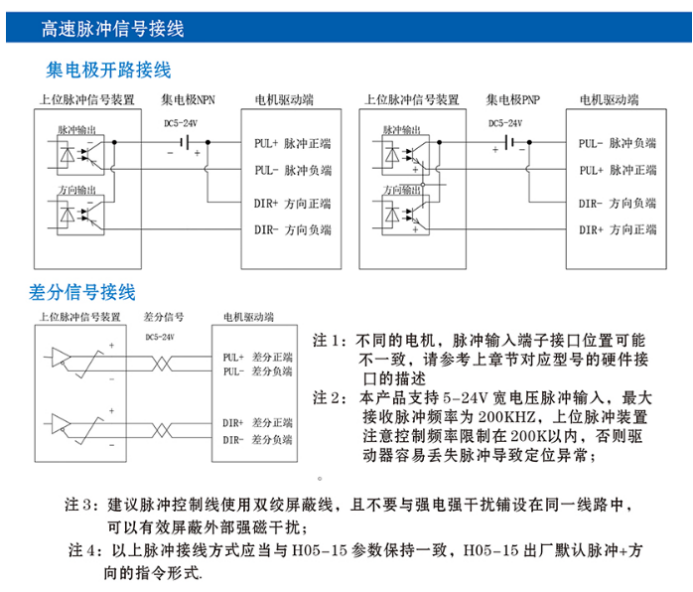
高い – 速度パルス信号の配線
コレクタ – オープン配線
差動信号の配線
注記 1: さまざまなモーター用, パルス入力端子のインターフェース位置は異なる場合があります. 前章の該当モデルのハードウェアインターフェースの説明を参照してください。.
注記 2: 本製品は幅広い電圧範囲のパルス入力に対応しています。 5 – 24v, 最大受信パルス周波数は200KHZです. 上部 – レベルパルス装置は、ドライバがパルスを失いやすく位置異常を引き起こさないように、周波数を200K以内に制限することに注意する必要があります。.
注記 3: ダブルでのご使用をお勧めします – パルス制御ラインにはシールド線を使用し、強力な配線と同じ回路内に敷設することは避けてください。 – 現在の干渉源, 外部の強力な磁気干渉を効果的にシールドできます。.
注記 4: 上記のパルス接続方法は、H05 と一致している必要があります。 – 15 パラメータ. H05の工場出荷時設定 – 15 脈拍です + 方向指令モード.
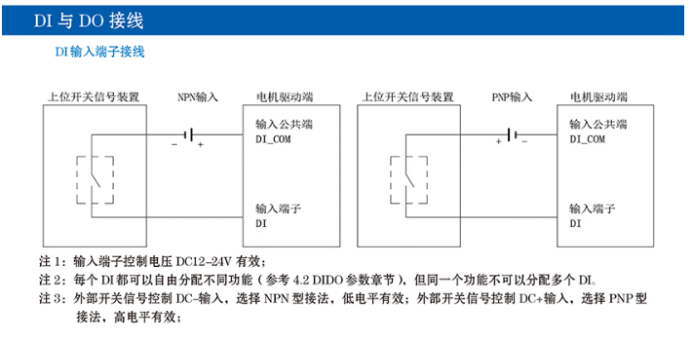
DIおよびDO配線
AT入力端子の配線
注記 1: 入力端子の制御電圧はDC12で有効です。 – 24v.
注記 2: 各DIに異なる機能を自由に割り当てることが可能 (を参照してください 4.2 DIDOパラメータセクション), ただし、複数のDIに同じ機能を割り当てることはできません.
注記 3: DCによる外部スイッチ信号制御用 – 入力, NPNを選択してください – タイプ接続方法, 低いところ – レベルが効果的; DC+入力による外部スイッチ信号制御用, PNPを選択します – タイプ接続方法, どこが高い – レベルが効果的.
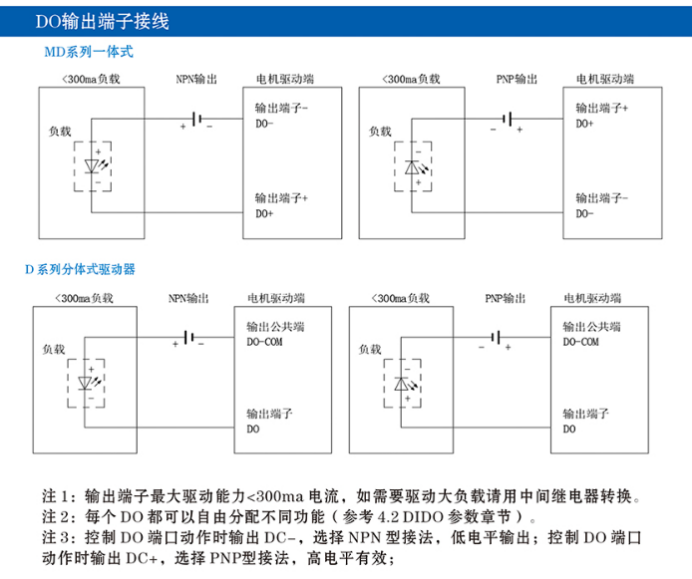
DO出力端子の配線
注記 1: 出力端子の最大駆動能力は、 <300現在. 大きな負荷を駆動する必要がある場合, 変換にはリレーを使用する必要があります.
注記 2: 各DOには異なる機能を自由に割り当てることができます (を参照してください 4.2 DIDOパラメータセクション).
注記 3: DOポートの動作を制御する場合, DCの場合 – 出力されます, NPNを選択してください – タイプ接続方法, 低いところ – レベル出力が有効です; DC+が出力されている場合, PNPを選択します – タイプ接続方法, どこが高い – レベル出力が有効です.
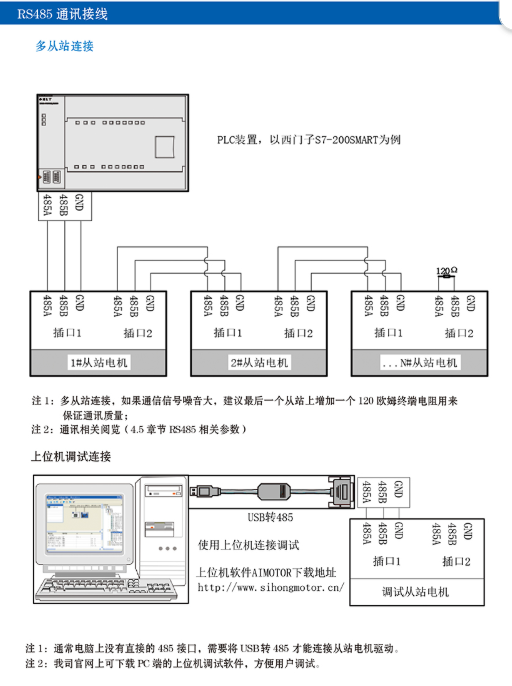
RS485通信配線
マルチ – スレーブ接続
注記 1: マルチ用 – スレーブ接続, 通信信号のノイズが大きい場合, を追加することをお勧めします 120 – 通信品質を確保するために最後のスレーブにオームの終端抵抗を接続する.
注記 2: コミュニケーションのため – 関連コンテンツ, 参照 (セクション 4.5 RS485 – 関連パラメータ).
ホストコンピュータのデバッグ接続
注記 1: いつもの, コンピュータには直接的な機能はありません 485 インタフェース, そしてUSB – に – 485 スレーブモータードライブに接続するにはコンバーターが必要です.
注記 2: PC用ホストコンピュータデバッグソフトは当社公式サイトからダウンロードできます。, ユーザーがデバッグするのに便利です.