

スプリット – タイプ EtherCATバスDCサーボドライバD – AIS4815E/D – AIS4825E

$0.00
技術的パラメータ
- 説明
説明

スプリット – タイプ EtherCATバスDCサーボドライバD – AIS4815E/D – AIS4825E
製品詳細
AIMOTORドライバーはEtherCATバス通信インターフェースを採用, EtherCATスレーブステーションテクノロジーの統合, ベクトル制御技術, 建てられた – ESCスレーブステーションプロセッサ内, 適応フィルタリング技術, そして閉まった – ループ制御技術. リアルを実現します – 時間制御とリアル – システムの時刻データ送信, モーターの性能を最適化する. 優れた安定性と超耐久性を備えています。 – 低騒音; スムーズで正確な純粋な正弦波電流ベクトル制御技術により、モーターの発熱が効果的に低減されます。.
技術仕様
| モデルパラメータ | d – AIS4815E | から – AIS4825E |
| 入力電源 | 24VDCの – 60VDCの | 24VDCの – 60VDCの |
| 定格電流 | 15あ | 25あ |
| ピーク電流 | 25あ | 50あ |
| フィードバック信号 | 17 – ビットアブソリュートエンコーダ | |
| エネルギー – ブレーキを消費する | 外部制動抵抗器を接続可能 | |
| 保護機能 | 以上 – 電圧保護, 下 – 電圧保護, 過負荷保護, ドライバー過熱保護, 等. | |
| 冷却方法 | 自然空冷 | |
| デジタル入力 | 5 – デジタル入力方式 (設定できる端末機能) | |
| デジタル出力 | 3 – デジタル出力方式 (設定できる端末機能) | |
| Modbus/RS485 | サポートされる最大ボーレート | |
| イーサキャット | CoEをサポート (CiA402 プロトコル) および CSP/CSV/PP/PV/PT/HM モード, 通信速度100M | |
| 動作温度 | 0 – 40℃ | |
| 保管温度 | – 10℃ – 70℃ |
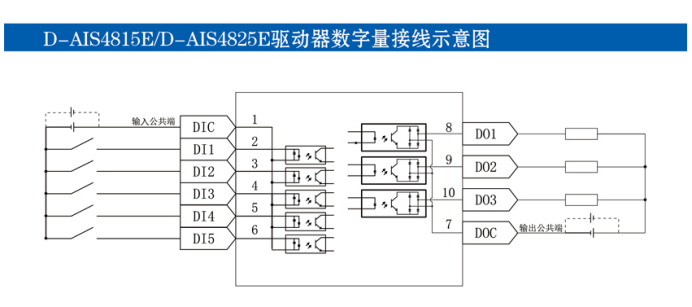
d – AIS4815E/D – AIS4825E ドライバーのデジタル配線の概略図
d – AIS4815E/D – AIS4825E ドライバー配線ポートの説明
CN1: 電源とモーターの位相ラインインターフェイス
| ピン番号 | シンボル | 関数 |
| 1 | + | 正の入力電源 |
| 2 | – | 負の入力電力 |
| 3 | W | モーターW – 段階 |
| 4 | V | エンジンV – 段階 |
| 5 | U | モーターU – 段階 |
CN2: モーター・エンコーダー・インターフェース
| ピン番号 | シンボル | 関数 |
| 1 | +5V | 5V出力 |
| 2 | 0V | 0V出力 |
| 3 | ノースカロライナ州 | 予約済み |
| 4 | ノースカロライナ州 | 予約済み |
| 5 | SD+ | データ送信 |
| 6 | SD- | データ受信 |
| 7 | PE | 地面 |
CN4: モーターブレーキインターフェース
| ピン番号 | シンボル | 関数 |
| 1 | BRK+ | ブレーキ出力 + |
| 2 | BRK- | ブレーキ出力 – |
CN3: デジタル信号入出力インターフェース
| ピン番号 | シンボル | 関数 |
| 1 | ディコム | 入力コモン端子 |
| 2 | DI12 | アラームのリセット |
| 3 | DI13 | 非常停止 |
| 4 | DI14 | ジョグ – ポジティブ |
| 5 | DI15 | ジョグ – 逆行する |
| 6 | ドコモ | 出力コモン端子 |
| 7 | DO1 | サーボレディ |
| 8 | DO2 | 故障警報 |
| 9 | DO3 | 位置決め完了 |
CN7/CN8: バス通信インターフェース
| ピン番号 | イーサキャット |
| 1 | TD+ |
| 2 | TD- |
| 3 | RD+ |
| 4 | \ |
| 5 | \ |
| 6 | RD- |
| 7 | \ |
| 8 | \ |
CN9: 制動放電インターフェース
| ピン番号 | シンボル | 関数 |
| 1 | P+ | DCバス + |
| 2 | d- | ブレーキ解除 |
CN10: 485 通信インターフェース
| ピン番号 | 485 インタフェース |
| 1 | 485あ |
| 2 | 485B |
| 3 | GND |
| 4 | 485B |
| 5 | ノースカロライナ州 |
| 6 | ノースカロライナ州 |
| 7 | ノースカロライナ州 |
| 8 | ノースカロライナ州 |
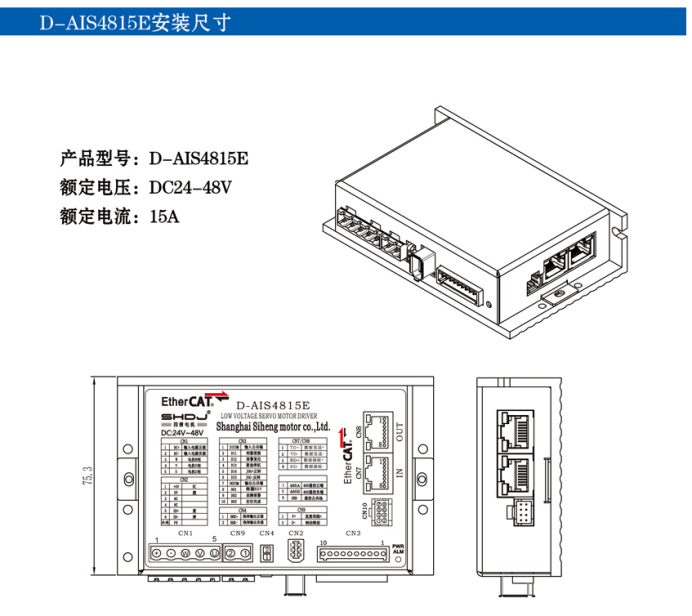
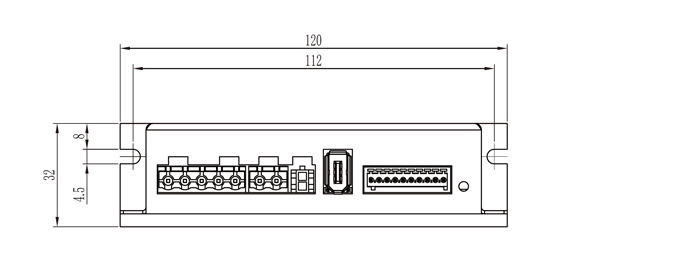
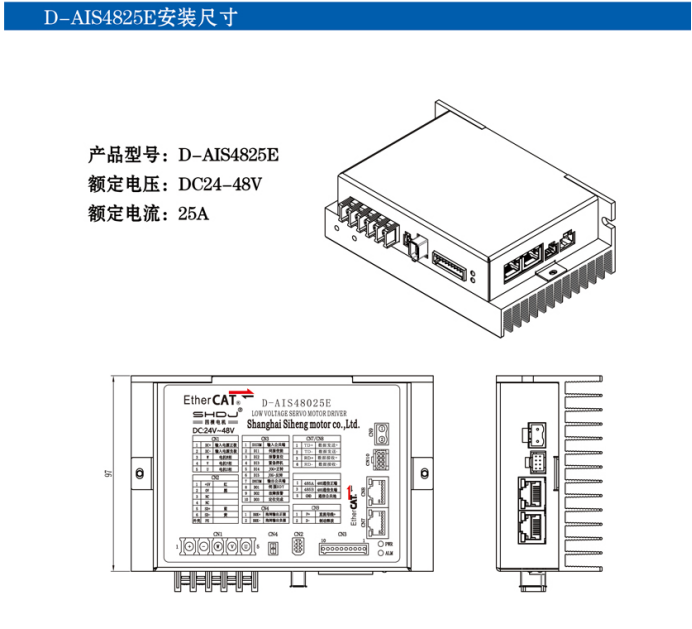
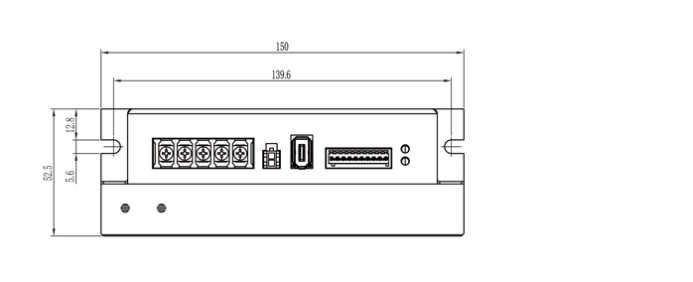
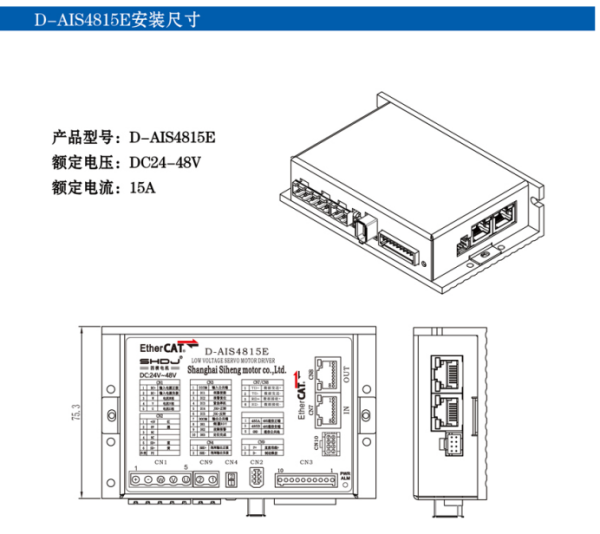
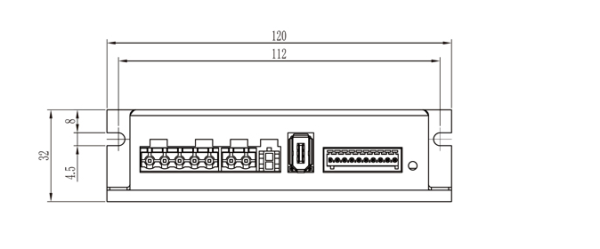
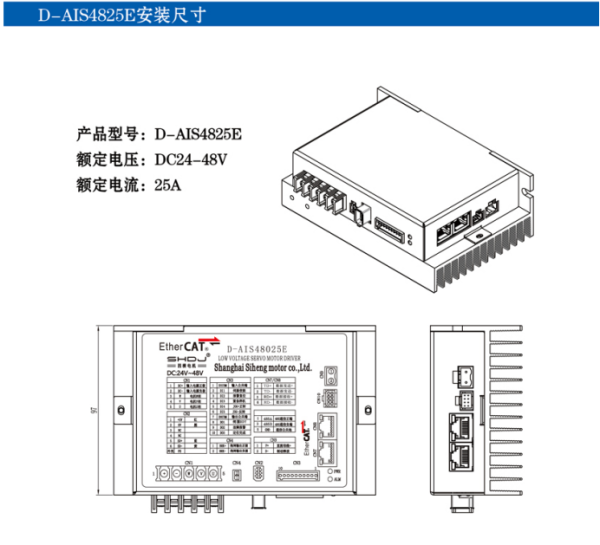
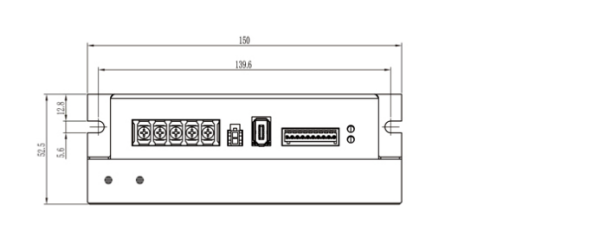
d – AIS4815E 取り付け寸法
製品型式: d – AIS4815E
定格電圧: DC24 – 48V
定格電流: 15あ