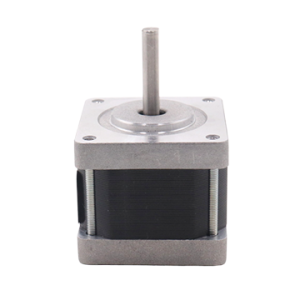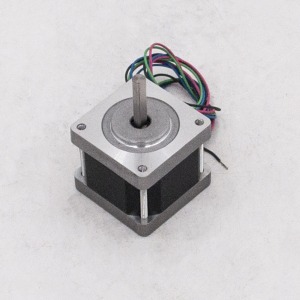

D – AIS72200A Baixo – driver de servo motor inteligente de tensão


$0.00
Parâmetros Técnicos
- Descrição
Descrição
D – AIS72200A Baixo – driver de servo motor inteligente de tensão
Detalhes do produto
Possui forte estabilidade, alto – posicionamento de precisão, alta resposta motora, baixo ruído, baixa geração de calor, multar – projeto estruturado, forte capacidade de sobrecarga, funções práticas e ricas, e aplicação simples e conveniente. Possui proteções contra excesso – tensão, sob – tensão, excesso de velocidade, sobre – atual, sobrecarga, anormalidades do codificador, desvio de posição, parar, anormalidades de parâmetros, etc..
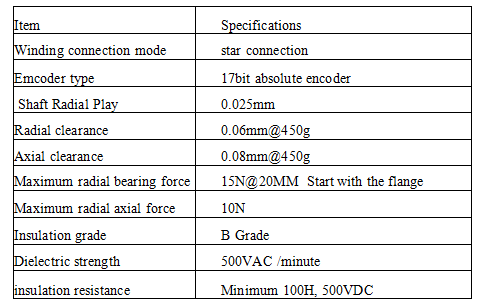
Especificações Técnicas
| Modelo de unidade | Faixa de tensão (V) | Corrente nominal (UM) |
| D – AIS24008A | 24 – 36 | 8 |
| D – AIS48015A | 24 – 48 | 15 |
| D – AIS48025A | 24 – 60 | 25 |
| D – AIS48050A | 24 – 72 | 50 |
| D – AIS48100A | 36 – 72 | 100 |
| D – AIS72200A | 48 – 96 | 200 |
| D – AIS72300A | 48 – 96 | 300 |
| Método de controle | ① Controle de Posição ② Controle de Velocidade ③ Controle de Torque ④ Controle de Comunicação |
| Características de controle | Resposta de frequência de velocidade: ≥200Hz, Frequência de pulso recebida ≤200kHz, Taxa de flutuação de velocidade: < ±0,03 (Carregar 0 – 100%): < ±0,02×(0.9 – 1.1) Tensão da fonte de alimentação |
| Função de monitoramento | Velocidade atual, Entrada DI, FAZER Saída, Posição atual, Acumulação de pulso de entrada de comando, Taxa média de carga, Contagem de desvio de posição, Corrente de fase do motor, Valor de tensão do barramento, Temperatura do Módulo, Registro de alarme, Velocidade correspondente à frequência de pulso de comando, Status operacional, etc.. |
| Lar – função de retorno | 13 Tipos de autônomo (Procurar) Lar – Modos de retorno, e casa – Função de deslocamento de ponto |
| Função Rs485 | Segue Modbus padrão – Protocolo Rtu, Um – para – Dois dois – Way Interface de comunicação para fácil rede e conexão paralela |
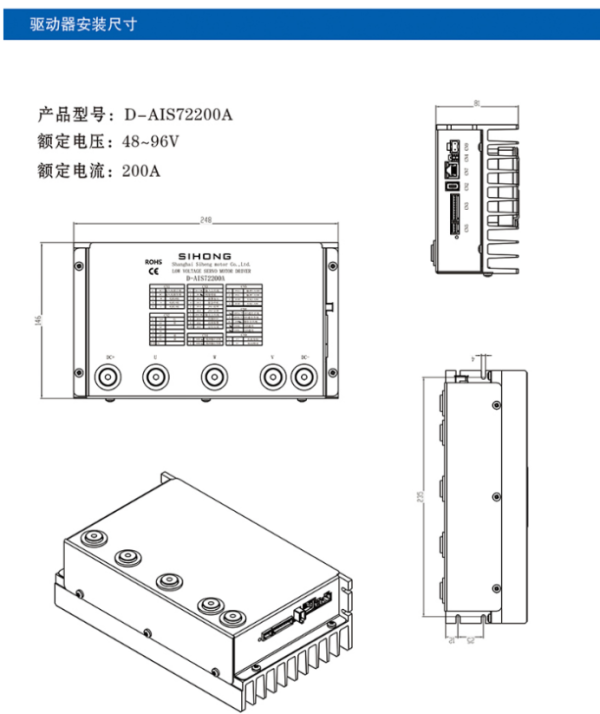
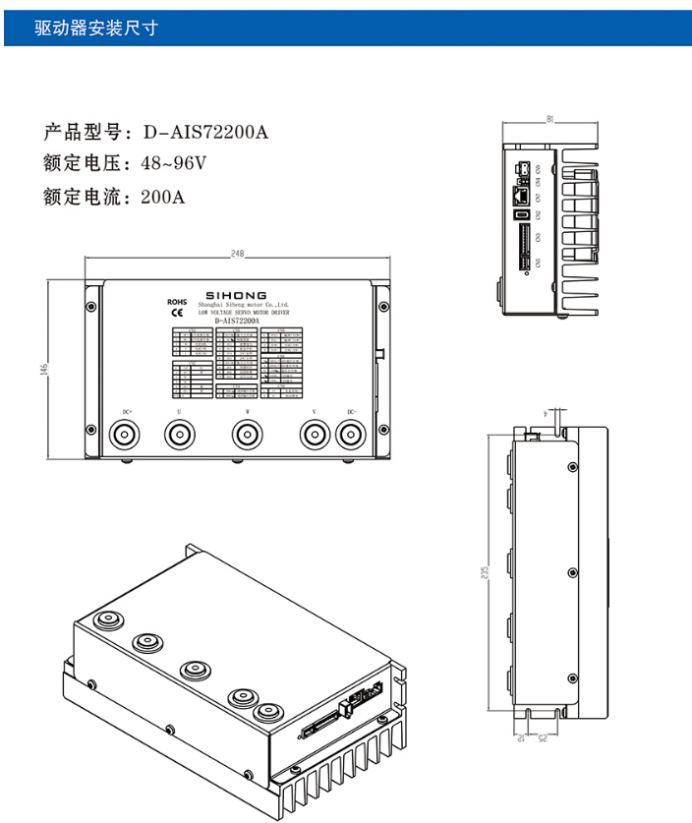
Dimensões de instalação do driver
Modelo de produto: D – AIS72200A
Tensão nominal: 48 – 96V
Corrente nominal: 200UM
Dividir – tipo Interface de hardware da unidade
Modelos de unidade aplicáveis: D – AISXX005A / D – AISXX0015A / D – AISXX0025A / D – AISXX0040A / D – AISXX00100A / D – AISXX00200A
Dividir – Diagrama de interface do inversor tipo AI MOTOR
| Número de série | Símbolo | Função | Observações | |
| Cn1 | 1 | Você | Motor U – Estágio | Cabo de alimentação Interface JVW para adaptação do motor |
| 2 | V | Motor V – Estágio | ||
| 3 | C | Motor W – Estágio | ||
| 4 | DC – | Pólo negativo da fonte de alimentação de entrada | A fonte de alimentação CC de entrada externa deve distinguir pólos positivos e negativos; faixa de tensão: DC48V | |
| 5 | CC+ | Pólo positivo da fonte de alimentação de entrada | ||
| Cn2 | 1 | 5V+ | Interface de alimentação do codificador do motor | Interface de potência para adaptação do encoder do motor |
| 2 | GND | Interface de energia | ||
| 3 | NC | Terminal vazio | Sem função | |
| 4 | NC | Terminal vazio | Sem função | |
| 5 | SD+ | Interface de comunicação do codificador do motor | Interface de comunicação para adaptação do encoder do motor | |
| 6 | SD – | |||
| Cn3 | 1 | DE – COM | Terminal comum de sinais de entrada | Terminal comum para todos os sinais DI de entrada. Quando DI – COM está conectado ao pólo positivo, o controle negativo do DI é eficaz; quando DENTRO – COM está conectado ao pólo negativo, o controle positivo do DI é eficaz |
| 2 | Di1 | Terminal de sinal de entrada 1 | Fábrica – função atribuída padrão: Servo habilitado | |
| 3 | ED2 | Terminal de sinal de entrada 2 | Fábrica – função atribuída padrão: Redefinição de alarme | |
| 4 | DI3 | Terminal de sinal de entrada 3 | Fábrica – função atribuída padrão: Parada de emergência | |
| 5 | DI4 | Terminal de sinal de entrada 4 | Fábrica – função atribuída padrão: JOG jog positivo | |
| 6 | DI5 | Terminal de sinal de entrada 5 | Fábrica – função atribuída padrão: JOG jog negativo | |
| 7 | FAZER – COM | Terminal comum de sinais de saída | Terminal comum para todos os sinais DO de saída. Quando FAZER – COM está conectado ao pólo positivo, o resultado positivo da ação DO é eficaz; quando FAZER – COM está conectado ao pólo negativo, o resultado negativo da ação DO é eficaz | |
| 8 | DO1 | Terminal de sinal de saída 1 | Fábrica – função atribuída padrão: Servo pronto | |
| 9 | DO2 | Terminal de sinal de saída 2 | Fábrica – função atribuída padrão: Saída de alarme de falha | |
| 10 | DO3 | Terminal de sinal de saída 3 | Fábrica – função atribuída padrão: Saída de conclusão de posicionamento | |
| Cn4 | 1 | BRK+ | Pólo positivo da saída do freio | Interface para adaptação do freio mecânico (freio) do motor |
| 2 | BRK – | Pólo negativo da saída do freio |
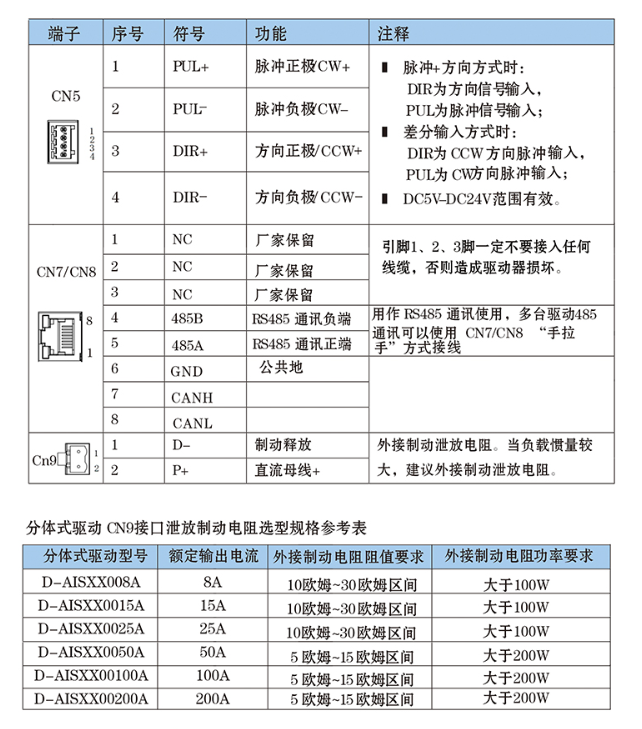
| terminal | Número de série | Símbolo | Função | Observações |
| CN5 | 1 | PUL+ | Pólo positivo do pulso (CW+) | Quando em pulso + modo de direção: DIR é a entrada do sinal de direção, e PUL é a entrada do sinal de pulso; quando no modo de entrada diferencial: DIR é a entrada de pulso na direção anti-horária, e PUL é a entrada de pulso de direção CW; eficaz dentro do DC5V – Faixa DC24V |
| 2 | PUL – | Pólo negativo do pulso (CW – ) | ||
| 3 | DIR+ | Pólo positivo de direção (CCW+) | ||
| 4 | DIR – | Pólo negativo de direção (CCW – ) | ||
| CN7/CN8 | 1 | NC | Reservado pelo fabricante | Alfinetes 1, 2, e 3 não deve ser conectado a nenhum fio, caso contrário, o driver será danificado |
| 2 | NC | Reservado pelo fabricante | ||
| 3 | NC | Reservado pelo fabricante | ||
| 4 | 485B | Terminal negativo de comunicação RS485 | Usado para comunicação RS485. Várias unidades podem ser conectadas em um “margarida – corrente” maneira usando CN7/CN8 para comunicação RS485 | |
| 5 | 485UM | Terminal positivo de comunicação RS485 | ||
| 6 | GND | Terreno comum | ||
| 7 | SOPA | |||
| 8 | AO VIVO | |||
| Cn9 | 1 | D – | Liberação do freio | Conecte um resistor de descarga de frenagem externo. Quando a inércia da carga é grande, recomenda-se conectar um resistor de descarga de frenagem externo |
| 2 | P+ | Barramento CC + |
Tabela de referência de especificação de seleção para descarga do resistor de frenagem do Split – tipo Interface de Unidade Cn9
| Dividir – tipo Modelo de Drive | Corrente de saída nominal | Requisito para valor de resistência do resistor de frenagem externo | Requisito de potência do resistor de frenagem externo |
| D – AISXX008A | 8UM | 10 ohms – 30 faixa de ohms | Maior que 100W |
| D – AISXX0015A | 15UM | 10 ohms – 30 faixa de ohms | Maior que 100W |
| D – AISXX0025A | 25UM | 10 ohms – 30 faixa de ohms | Maior que 100W |
| D – AISXX0050A | 50UM | 5 ohms – 15 faixa de ohms | Maior que 200W |
| D – AISXX00100A | 100UM | 5 ohms – 15 faixa de ohms | Maior que 200W |
| D – AISXX00200A | 200UM | 5 ohms – 15 faixa de ohms | Maior que 200W |
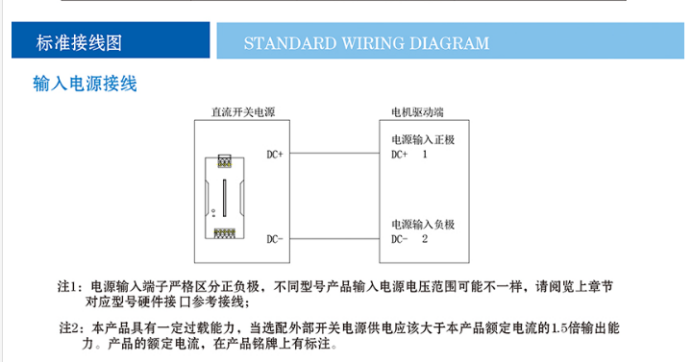
Diagrama de fiação padrão
Fiação da fonte de alimentação de entrada
Observação 1: Os terminais da fonte de alimentação de entrada devem distinguir estritamente os pólos positivos e negativos. A faixa de tensão da fonte de alimentação de entrada pode variar para diferentes modelos. Consulte a fiação de referência da interface de hardware para o modelo correspondente no capítulo anterior.
Observação 2: Este produto tem uma certa capacidade de sobrecarga. Ao selecionar uma fonte de alimentação de comutação externa, a capacidade de produção deve ser 1.5 vezes a corrente nominal deste produto. A corrente nominal do produto está indicada na placa de identificação.
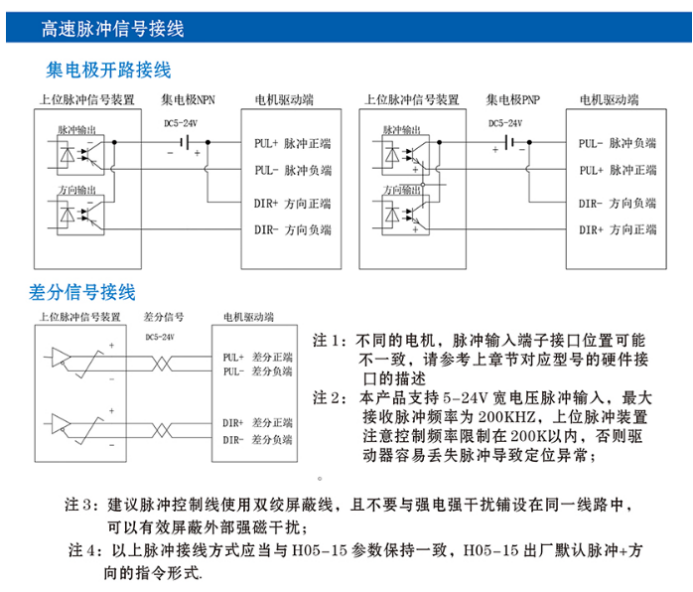
Alto – Fiação de sinal de pulso de velocidade
Coletor – Fiação aberta
Fiação de sinal diferencial
Observação 1: Para motores diferentes, as posições da interface dos terminais de entrada de pulso podem variar. Consulte a descrição da interface de hardware do modelo correspondente no capítulo anterior.
Observação 2: Este produto suporta entrada de pulso com uma ampla faixa de tensão de 5 – 24V, e a frequência máxima de pulso recebida é 200KHZ. A parte superior – dispositivo de pulso de nível deve prestar atenção ao limitar a frequência dentro de 200K para evitar que o driver perca pulsos facilmente e cause anormalidades de posicionamento.
Observação 3: Recomenda-se usar duplo – fios blindados para linhas de controle de pulso e evite colocá-los no mesmo circuito que cabos fortes – fontes de interferência atuais, que pode efetivamente proteger forte interferência magnética externa.
Observação 4: Os métodos de conexão de pulso acima devem ser consistentes com o H05 – 15 parâmetros. O padrão de fábrica para H05 – 15 é pulso + modo de comando de direção.
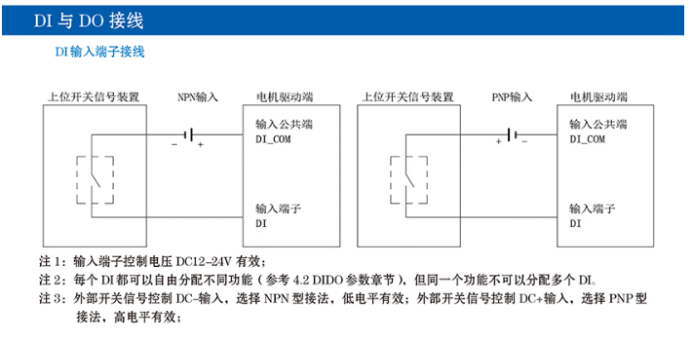
Fiação DI e DO
Fiação do terminal de entrada AT
Observação 1: A tensão de controle dos terminais de entrada é válida em DC12 – 24V.
Observação 2: Cada DI pode receber livremente diferentes funções (consulte o 4.2 Seção de parâmetros DIDO), mas a mesma função não pode ser atribuída a vários DIs.
Observação 3: Para controle de sinal de chave externa com DC – entrada, selecione o NPN – tipo método de conexão, onde baixo – nível é eficaz; para controle de sinal de comutação externo com entrada DC+, selecione o PNP – tipo método de conexão, onde alto – nível é eficaz.
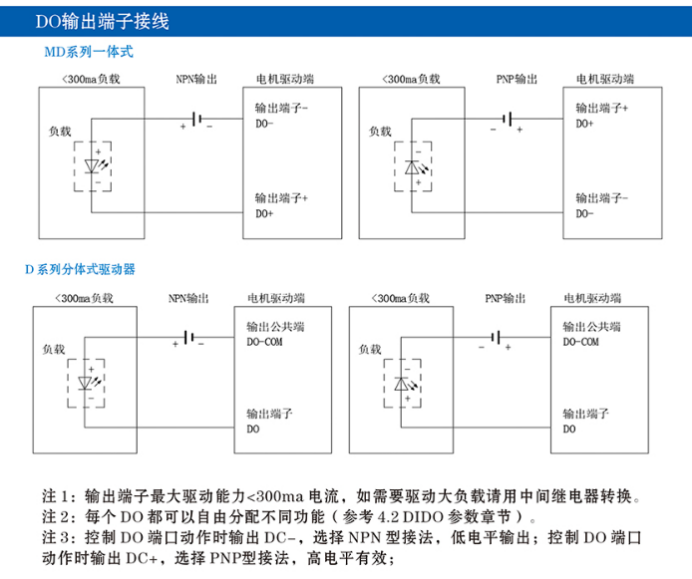
Fiação do terminal de saída DO
Observação 1: A capacidade máxima de acionamento dos terminais de saída é <300minha corrente. Se uma carga grande precisar ser conduzida, um relé deve ser usado para conversão.
Observação 2: Cada DO pode receber livremente diferentes funções (consulte o 4.2 Seção de parâmetros DIDO).
Observação 3: Ao controlar a ação da porta DO, se DC – é saída, selecione o NPN – tipo método de conexão, onde baixo – saída de nível é eficaz; se DC+ for emitido, selecione o PNP – tipo método de conexão, onde alto – saída de nível é eficaz.
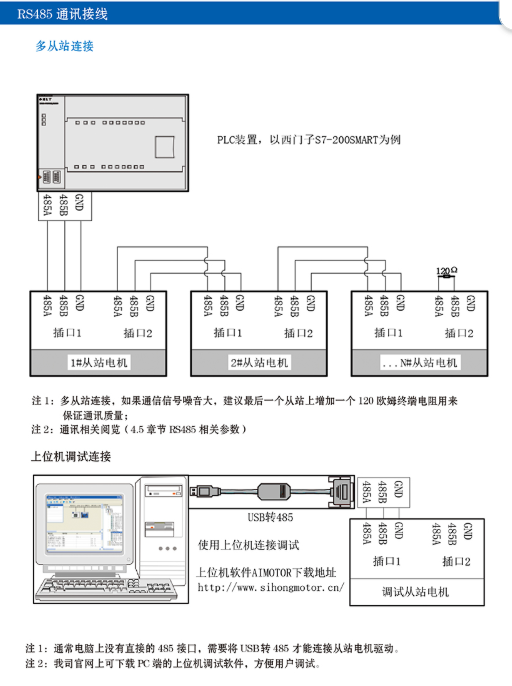
Fiação de comunicação RS485
Múltiplo – Conexão Escrava
Observação 1: Para vários – conexão escrava, se o ruído do sinal de comunicação for grande, é recomendado adicionar um 120 – ohm resistor terminal até o último escravo para garantir a qualidade da comunicação.
Observação 2: Para comunicação – conteúdo relacionado, consulte (seção 4.5 RS485 – parâmetros relacionados).
Conexão de depuração do computador host
Observação 1: Geralmente, um computador não tem conexão direta 485 interface, e um USB – para – 485 conversor é necessário para conectar ao acionamento do motor escravo.
Observação 2: O software de depuração do computador host para PC pode ser baixado do site oficial da nossa empresa, o que é conveniente para os usuários depurarem.